Для случая линейной системы с p входами, q выходами и n переменными состояния описание имеет вид:


Где x— вектор состояния, элементы которого называются состояниями системы, y— вектор выхода, u— вектор управления, A — матрица системы, B— матрица управления, C— матрица выхода и D— матрица прямой связи.
Как известно, любой передаточной функции можно поставить в соответствие дифференциальное уравнение вида:

Выбор переменных состояния в принципе произволен и определяется зачастую исключительно удобством вычислений, поэтому введем следующие обозначения:
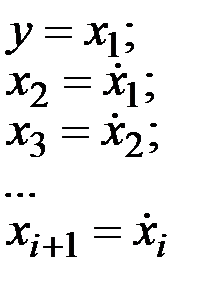
где i изменяется до n-1, тогда получим следующие уравнения
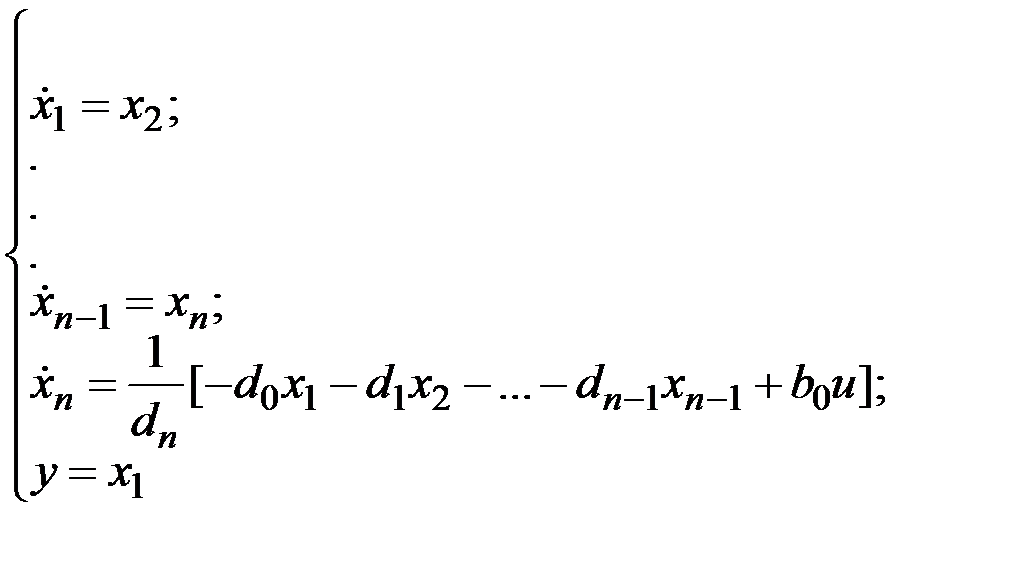
Из этой системы получим матрицы для описания системы в пространстве состояний.
В Matlab для получения матриц пространства состояния используется функция tf2ss, которая записывается в виде: [A,B,C,D]=tf2ss(num,den)
Получаем матрицы следующего вида:
A =
-0.0001 -0.0033 -0.1733 -3.9403 -9.6332 -6.6908 0
1 0 0 0 0 0 0
0 1 0 0 0 0 0
0 0 1 0 0 0 0
0 0 0 1 0 0 0
0 0 0 0 1 0 0
0 0 0 0 0 1 0
B =
C =
1.0e+007 *
0.0000 -0.0000 -0.0000 -0.0000 0.0625 5.7901 5.7901
D =
Исследование системы на управляемость и наблюдаемость.
Любая САУ должна обладать свойствами управляемости и наблюдаемости.
Говорят, что система, описываемая матрицами A и B, является управляемой, если существует такое неограниченное управление u, которое может перевести систему из произвольного начального состояния x(0) в любое другое заданное состояние x(t).
Для системы с одним входом и одним выходом вводится понятие матрицы управляемости, которая имеет вид

и имеет размерность n×n. Если определитель матрицы не равен нулю, то матрица является управляемой.
Калман предложил ранговые критерии. По Калману система называется вполне управляемой, если ранг матрицы управляемости равен n
Получим матрицу управляемости и найдем ее определитель и ранг с помощью следующих вычислений в Matlab:
F 1= A * B
F 2=(A ^2)* B
F 3=(A ^3)* B
F 4=(A ^4)* B
F 5=(A ^5)* B
F 6=(A ^6)* B
PC =[ B F 1 F 2 F 3 F 4 F 5 F6]
dp= det (PC)
rp = rank (PC)
Получаем, что определитель матрицы управления не равен 0, а ранг
матрицы равен 4. Следовательно, система не является вполне управляемой. Матрицу управляемости также можно получить при помощи функции ctrb(A,B).
Система является наблюдаемой тогда и только тогда, если существует конечное время T такое, что начальное состояние x(0) может быть определено в результате наблюдения выходной переменной y(t), t  T, при заданном управлении u(t).
T, при заданном управлении u(t).
Система является наблюдаемой, если определитель матрицы Q размерностью n×n, называемой матрицей наблюдаемости, не равен нулю, где

По Калману, система является вполне наблюдаемой, если ранг матрицы наблюдаемости равен n.
Находим матрицу наблюдаемости в Matlab:
F 1= A '* C '
F 2=((A ')^2)* C '
F 3=((A ')^3)* C '
F 4=((A ')^4)* C '
F 5=((A ')^5)* C '
F6 =((A ')^6)* C '
Q =[ C ' F 1 F 2 F 3 F 4 F 5 F6]
dq= det (Q)
rq = rank (Q)
Получаем, что определитель матрицы наблюдаемости не равен 0, ранг матрицы – 7. Следовательно, система является вполне наблюдаемой.
Цифровая модель САУ
Для получения цифровой модели САУ используем функцию c2d (sys, Ts, method). Эта функция имеет следующие параметры:
Sys – система, дискретизацию которой необходимо провести;
Ts - время квантования;
method –строковая константа, обозначающая метод дискретизации. Например, ' tustin ' –преобразование Тастина с использованием квантования по уровню.
Рассмотрим преобразование Тастина более подробно на примере корректирующего устройства системы, передаточная функция которого имеет вид:

Формула Тастина для перехода ПФ к z-преобразованию:
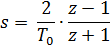
С учетом формулы Тастина проведем z-преобразование корректирующего устройства для стандартного времени квантования T0=0,025

Вычисления в Matlab с помощью функции c2d дают тот же результат:
Transfer function:
0.001496 z^2 + 0.002991 z + 0.001496
------------------------------------
z^2 - 1.564 z + 0.5745
Sampling time: 0.025
Как известно изображения входной и выходной величины блока связаны передаточной функцией:

Отсюда имеем

Разностное уравнение:

Эквивалентная схема САУ представлена на рис. 8.
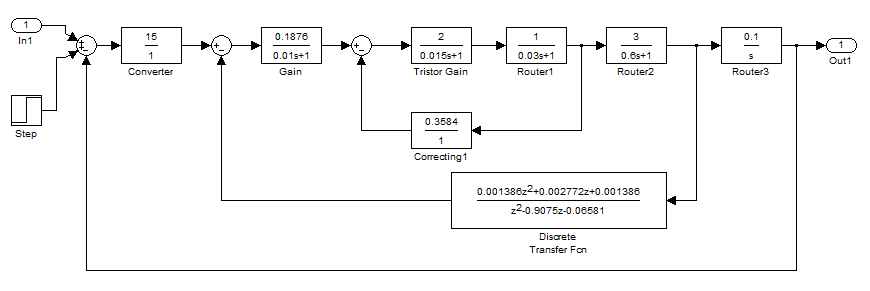
Рисунок 8 - Эквивалентная схема САУ
По разностному уравнению можно построить не только эквивалентную схему корректирующего устройства, но и подставляя конкретные k получить систему реккурентных соотношений, по которой определить значения выходного сигнала в зависимости от входного для каждого периода квантования и построить переходную функцию. Для построения переходной функции в нашем случае используем Matlab. Результат сравнения переходных функций изображен на рис. 9.
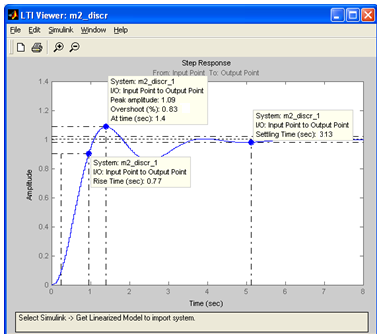
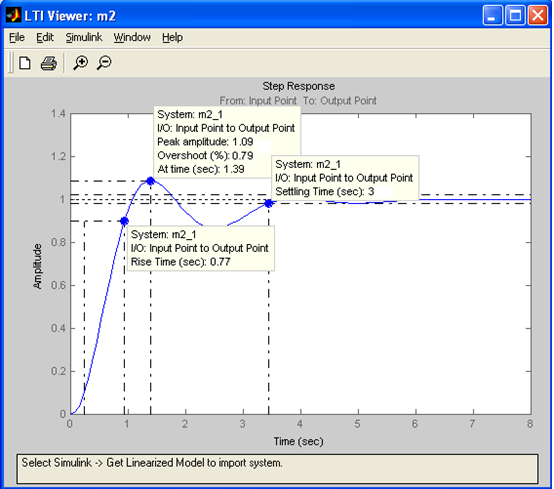
Рисунок 9 - Сравнение переходных функций систем для цифрового (вверху) и аналогового (внизу) входных сигналов
Характеристики переходной функции для цифрового сигнала: время нарастания – 0.77с, перерегулирование –0.83%, длительность переходного процесса – 5.13с. Эти характеристики отличаются от таковых, полученных в п. 2, следовательно, дискретизация системы вносит неточность в сигнал.








