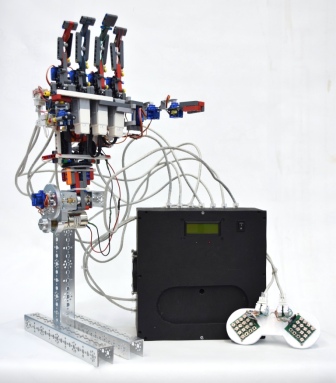
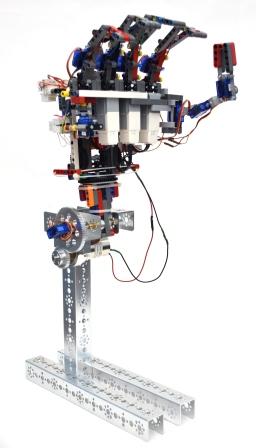
Для построения аппаратного сурдопереводчика было использовано большое количество деталей. Общий вид переводчика представлен на рисунке 6.
|
| Рисунок 6. Общий вид аппаратного сурдопереводчика.
|
Для размещения управляющей электроники был разработан специальный бокс (рис. 7).

|

| 
|
| Рисунок 7. Бокс с электроникой.
|
На внешней части бокса находятся: джойстик, с помощью которого можно управлять рукой; дисплей для отображения введённых символов; выключатель размыкающий питание на плате Arduino Mega 2560; два светодиода сигнализирующие о готовности сурдопереводчика.
Внутри бокса находятся: Arduino Mega 2560, Motor Shield (2 канала, 2 А) (3 шт.), Multiservo Shield (1 шт.), соединительные провода, вентилятор 80 мм на 80 мм 12 V (1 шт.) (рис. 8).

|
| Рисунок 8. Внутренняя часть бокса.
|
Для удобного подключения манипулятора и джойстика к боксу управления были установлены сетевые розетки под коннектор RJ45 (Рис.9). Для подключения к розеткам используется сетевой кабель «витая пара» обжатый с обеих сторон по протоколу «А».

| 
|
| Рисунок 9. Розетки под коннекторы RJ45.
|
Для подключения компьютерного блока питания к боксу управления на самом боксе были установлены специальные разъёмы (рис. 10).

|
| Рисунок 10. Специальные разъёмы для подключения питания.
|
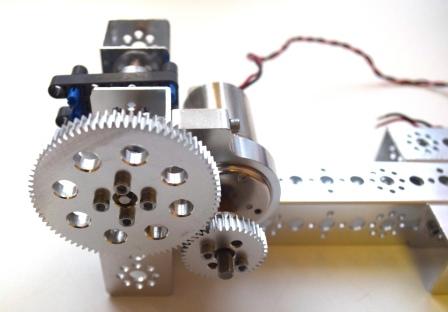
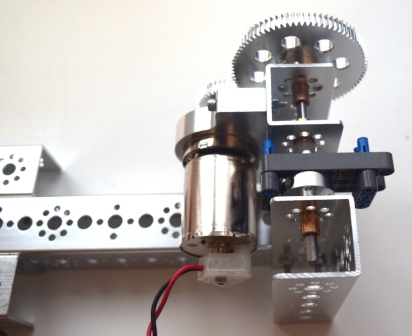
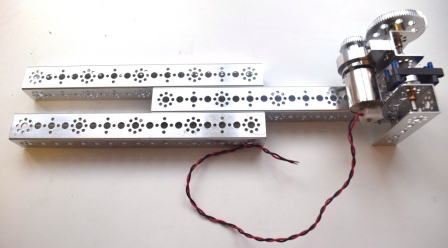
Сам манипулятор был разработан с использованием конструкторов TETRIX и Lego. Из конструктора TETRIX была собрана основа, на которой расположен DC мотор и зубчатая передача для перемещения манипулятора (рис. 11).
| 
|
|
| Рисунок 11. Подстава с зубчатой передачей из конструктора TETRIX.
|
Благодаря использованию сервомоторов удалось создать манипулятор максимально повторяющий движение человеческой руки. Для управления манипулятором была написана программа на языке Arduino IDE. Вся система работает под управлением Arduino Mega 2560 (см. Приложение Б. Отрывок кода).
Аппаратный сурдопереводчик работает следующим образом: при нажатии клавиши на джойстике, которая соответствует необходимой букве латинского алфавита, сигнал, соответствующий данной кнопке поступает в Arduino Mega 2560. Программа анализирует сигнал и сопоставляет его с частью программного кода, который в дальнейшем запускает необходимую комбинацию положения сервомоторов и формирует на манипуляторе соответствующий нажатой клавише дактильный жест (рис.12). Жест задерживается на манипуляторе на 500 мс, после чего манипулятор принимает исходное положение. Скорость данного манипулятора 40-60 жестов в минуту.

| 
|
| Рисунок 12. Демонстрация буквы «С»
|
Вывод:
Разработан аппаратный сурдопереводчик осуществляющий перевод из букв латинского алфавита в дактильную азбуку. Скорость данного переводчика 40-60 символов в минуту. Для увеличения скорости перевода нужны конструктивные изменения манипулятора.








