Погрешность базирования при установке вала на призму

Рис. 2.1. Схема для определения погрешностей базирования при установки вала на призму
При обработке вала в призме могут быть следующие измерительные базы для размера h.

Рис. 2.2. Измерительные базы при обработке вала в призме
На рис. 2.1 представлена схема установки вала на призму для обработки в размер h (h1; h2; h3). Диаметр вала может колебаться в пределах:

Измерительной базой является:
для размера h1 - т.А (А/; А//)
для размера h2 - т.В (В/; В//)
для размера h3 - т.С (С/; С//)
Установочной базой является т. К (К/; К//). Инструмент постоянно настроен на размер Н. Поскольку установочная и измерительная базы не совпадают, то погрешность базирования ee¹0.
Для h1:
тогда:
По аналогии:
Следовательно:
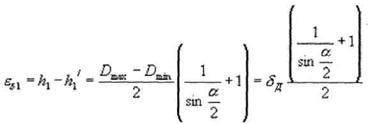
По аналогии:

Обозначим через:
Таблица 2.1
Значение коэффициентов К
| К
| Угол призмы в 0
|
|
|
|
| К1
| 1,5
| 1,21
| 1,07
|
| К2
| 0,5
| 0,21
| 0,08
|
| Кз
| 1,0
| 0,71
| 0,58
|
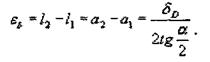
2.2. Погрешность базирования при установке вала на жесткий центр
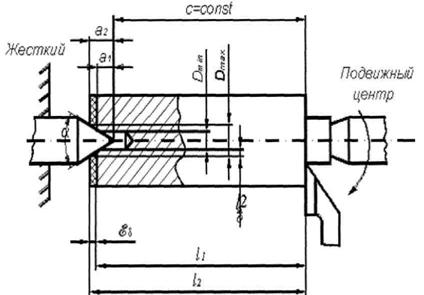
Рис. 2.3. Схема установки вала на жесткий центр
На рис. 2.3 представлена схема установки вала на жесткий и подвижный центры для обработки ступени вала в размер l.
Диаметр центрового отверстия может колебаться в пределах

Измерительной базой для размера / будет левый торец вала. Перемещение суппорта станка прекращается выключением подачи при достижении резцом размера С. Так как измерительная и установочная база не совпадают, то ee¹0.
ee=0 если вместо жесткого центра применить конструкцию плавающего центра. В результате этого торец вала станет установочной базой.
Погрешность базирования при установке корпусной детали на плоскость и два отверстия перпендикулярные плоскости
Рассмотрим погрешность базирования с использованием установочных пальцев, один из которых срезанный.
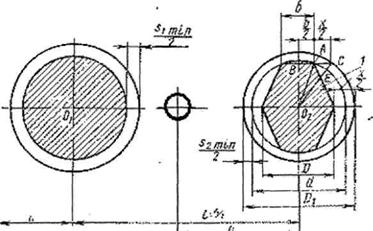
Рис. 2.4. Схема для определения погрешности базирования при установке корпусной детали на два пальца
Если оба пальца цилиндрические, то должно выполняться неравенство:

При установке на цилиндрический и срезанный:
где: X - увеличенный зазор после среза пальца; d 0 — допуск на расстояние между осями отверстий; dп — допуск на расстояние между осями пальцев.

В данном случае без среза пальца нормальная установка на два цилиндрических пальца невозможна, так как обычно допуск на размер L больше, чем сумма зазоров в сопряжениях двух пальцев.
d0>S1+S2
где: d 0 - допуск размера L; S1 и S2 - зазоры.
Измерительной базой являются:
• для размера l1 - ось первого отверстия заготовки;
• для размера l2 - ось второго отверстия заготовки.
Установочной базой являются цилиндрические поверхности отверстий.
В данном случае установочная и измерительная база не совпадают ee¹0.
Для определения погрешности базирования надо найти зазоры.
Опустив промежуточные выводя, имеем:

Следовательно, чем меньше хорда b, тем больше зазор X.
Однако, применение срезанных пальцев с небольшой хордой «b» приводит к быстрому износу пальцев.
Теперь можно написать:








