

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...
Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...
Папиллярные узоры пальцев рук - маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни...
Топ:
Оснащения врачебно-сестринской бригады.
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов...
Эволюция кровеносной системы позвоночных животных: Биологическая эволюция – необратимый процесс исторического развития живой природы...
Интересное:
Искусственное повышение поверхности территории: Варианты искусственного повышения поверхности территории необходимо выбирать на основе анализа следующих характеристик защищаемой территории...
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
Задание № 1. Плоская система произвольно расположенных сил. Определение реакций опор твердого тела
На схемах (рис. 1 – 4) показаны три способа закрепления бруса, ось которого – ломаная линия. Задаваемая нагрузка (см. табл. 1) и линейные размеры элементов бруса (м) во всех трех случаях одинаковы.
Определить все реакции опор для того способа закрепления бруса (а, б или в), при котором искомая реакция, указанная в табл. 1 имеет наименьший модуль, т.е. наименьшее по абсолютной величине значение.
Таблица 1
| Номер варианта (рис. 1 – 4) | Р, кН | М, кН·м | q, кН/м | Иссле-дуе- мая реак-ция | Номер вари-анта (рис. 1 – 4) | Р, кН | М, кН·м | q, кН/м | Иссле-дуе- мая реакция |
| YA | MA | ||||||||
| MA | YA | ||||||||
| YB | XA | ||||||||
| YB | RB | ||||||||
| – | XB | – | YA | ||||||
| MA | MA | ||||||||
| XA | YA | ||||||||
| RB | MA | ||||||||
| – | YA | YA | |||||||
| XA | XA | ||||||||
| RB | MA | ||||||||
| YA | XA | ||||||||
| YA | YA | ||||||||
| YA | – | MA | |||||||
| XA | RB |
Рис. 1. Варианты схем нагрузки бруса к заданию № 1
 Рис. 2. Варианты схем нагрузки бруса к заданию № 1 (продолжение)
Рис. 2. Варианты схем нагрузки бруса к заданию № 1 (продолжение)
 Рис. 3. Варианты схем нагрузки бруса к заданию № 1 (продолжение)
Рис. 3. Варианты схем нагрузки бруса к заданию № 1 (продолжение)
 Рис. 4. Варианты схем нагрузки бруса к заданию № 1 (окончание)
Рис. 4. Варианты схем нагрузки бруса к заданию № 1 (окончание)
Задание № 2. Центр тяжести. Определение
Положения центра тяжести различных тел
Найти координаты центра тяжести плоского сечения, составленного из стандартных прокатных профилей (варианты 1 – 6), плоской фигуры (варианты 7 – 18 и 24 – 30) или объема (варианты 19 – 23), показанных на рис. 5 – 7. В вариантах 1 – 6 размеры указаны в миллиметрах, а в вариантах 7 – 30 – в сантиметрах.

Рис. 5. Варианты видов тел, плоских фигур и объемов к заданию № 2

Рис. 6. Варианты видов тел, плоских фигур и
объемов к заданию № 2 (продолжение)

Рис. 7. Варианты видов тел, плоских фигур и
объемов к заданию № 2 (окончание)
Задание № 3. Определение равновесия сил, приложенных
К механической системе, с учетом сцепления (трения покоя)
Определить минимальное (в вариантах 1 – 20, 25, 26, 29, 30) или максимальное (в вариантах 21 – 24, 27, 28) значение силы Р и реакции опор системы, находящейся в покое. Схемы вариантов представлены на рис. 8 – 10, а необходимые для расчета данные – в табл. 2.
В вариантах 1 – 20 сцепление (трение покоя) учесть только между тормозной колодкой и барабаном. В вариантах 21 – 30 учесть сцепление в двух опорных точках тела весом G.
Таблица 2
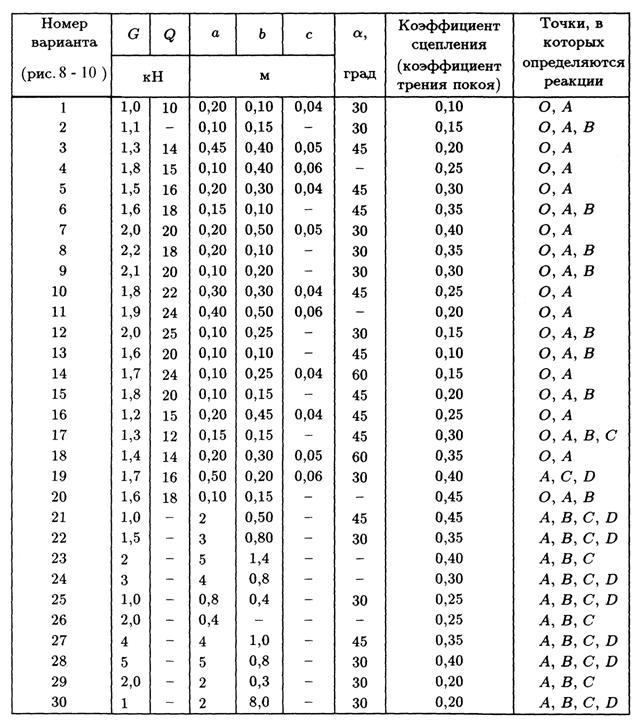
 Рис. 8. Варианты механических систем к заданию № 3
Рис. 8. Варианты механических систем к заданию № 3
 Рис. 9. Варианты механических систем к заданию № 3 (продолжение)
Рис. 9. Варианты механических систем к заданию № 3 (продолжение)
 Рис. 10. Варианты механических систем к заданию № 3 (окончание)
Рис. 10. Варианты механических систем к заданию № 3 (окончание)
Раздел второй. Кинематика точки и твердого тела
Задание № 4. Определение скорости и ускорения точки
По заданным уравнениям её движения
По заданным уравнениям движения точки М установить вид её траектории и для момента времени t = t1 (c) найти положение точки на траектории, её скорость, полное, касательное и нормальное ускорения, а также радиус кривизны траектории.
Необходимые для решения данные приведены в табл. 3.
Таблица 3

Задание № 5. Определение скоростей и ускорений точек твёрдого тела при поступательном и вращательном движениях
Движение груза 1 должно описываться уравнением
x = c2t2 + c1t + c0,
где t – время, c; с0-2 – некоторые постоянные.
В начальный момент времени (t = 0) координата груза должна быть x0, а его скорость – v0.
Кроме того, необходимо, чтобы координата груза в момент времени t = t2 была равна x2.
Определить коэффициенты с0, с1 и с2, при которых осуществляется требуемое движение груза 1. Определить также в момент времени t = t1 скорость и ускорение груза и точки М одного из колес механизма.
Схемы механизмов показаны на рис. 11 – 13, а необходимые данные приведены в табл. 4.
Таблица 4

 Рис 11. Схемы механизмов к заданию № 5
Рис 11. Схемы механизмов к заданию № 5
Рис. 12. Схемы механизмов к заданию № 5 (продолжение)

 Рис. 13. Схемы механизмов к заданию № 5 (окончание)
Рис. 13. Схемы механизмов к заданию № 5 (окончание)
|
|
|

Общие условия выбора системы дренажа: Система дренажа выбирается в зависимости от характера защищаемого...

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...
© cyberpediasu.com 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

