Следующим этапом автоматической идентификации ТОУ с помощью пакета SystemIdentificationToolboxявляется проверка качества модели или ее адекватности по выбранному критерию близости выходного сигнала модели и объекта.
В пакете SystemIdentificationToolboxиспользуются следующие модели дискретных объектов для временной области, учитывающие действие шума наблюдения [7, 8]:
1. Модель авторегрессии AR (AutoRegressive) считается наиболее простым описанием:
A(z) y(t) = u(t), где A(z) = 1 + a 1 z – 1 + a 2 z – 2 +...+ ana z – na.
2. ARX – модель (AutoregressivewitheXternalinput) учитывает два параметра: управляющий сигнал  и дискретный белый шум
и дискретный белый шум  :
:
A (z) y(t) = B (z) u (t) + e (t),
где  .
.
Или в развернутом виде:
 ,
,
3. ARMAX-модель (AutoRegressive-MovingAveragewihteXternalinput)или модель авторегрессии скользящего среднего:
 ,
,
где nk – величина задержки (запаздывания),
 .
.
4. Модель «вход-выход» (в иностранной литературе Output-Error»):
 ,
,
где  .
.
5. Модель Бокса-Дженкинса (BJ) описывается выражением вида:
 ,
,
зависимости B (z), F (z), C (z) рассчитывают аналогичным образом, а полином D (z) определяется по формуле:
 .
.
6. Модель для переменных состояния (State-space) представляет собой систему уравнений:
 ,
,
 ,
,
где A, B, C, D – матрицы соответствующих размеров, v (t) – коррелированный белый шум наблюдений.
Для построения модели технологического объекта и проверки ее качества необходимо выполнить команду PolynomialModels. В результате появится рабочее окно со списком в контекстном меню Structureназваний встроенных моделей (рис. 16). Установив требуемое значение, например ARX, и нажав кнопку Estimate, в разделе Importmodels добавляется новая модель (рис. 18).
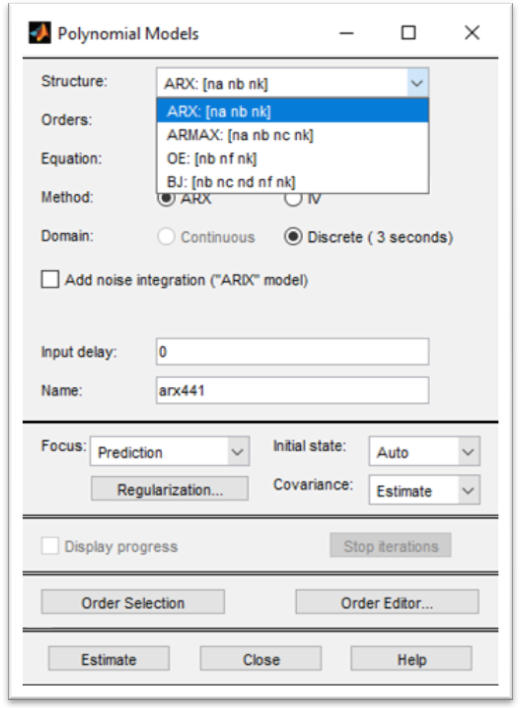
Рисунок 16 – ДиалоговоеокноPolynomialModels
Для сравнительного анализа результатов моделирования необходимо воспользоваться всеми имеющимися методами, т.е. поочередно выбрать из предложенного ряда модели из перечня представленного выше (ARX, ARMAX, OE или BJ), каждый разнажимая кнопку Estimate, вызываем в правой части диалогового окна поля для ввода параметров (рис. 17).

Рисунок 17– Модели технологического объекта управления
Для выбора наиболее адекватной модели технологического объекта управления, которая впоследствии будет использоваться при решении задач анализа и синтеза регулятора системы управления, в диалоговом окне Estimate выбираем быстрый старт QuickStart. Программа автоматически выполнит сравнение моделей, полученных на основе измеренных выходных параметров Measuredandsimulatedmodeloutput, сформировав процент адекватности (рис. 18).
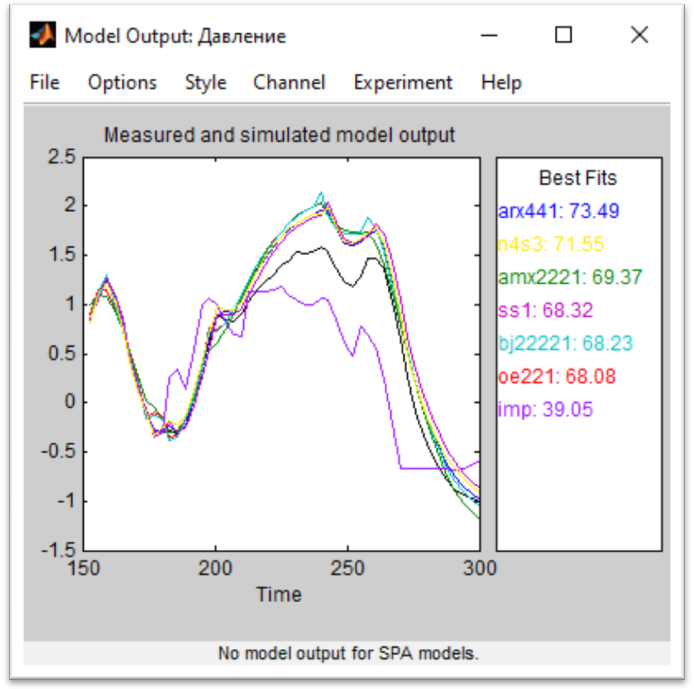
Рисунок 18 – Оценка адекватности моделей ТОУ
Таким образом, для рассматриваемого примера наиболее адекватной, т.е. максимально соответствующей экспериментальным данным, полученным в результате исследования кривой разгона технологического объекта управления,является модель arx441 с процентом адекватности 73,49%.








