Для создания зубчатого зацеплениямежду валами: Редуктор Вал1 и Редуктор Вал2:
- щелкните на панели инструментов по кнопке  Зубчатое зацепление. Появится в окне Анимация ранее установленные векторы и точки их приложения для каждого вала, а также окно подсказки Добавление элемента к объекту рис. 4.14;
Зубчатое зацепление. Появится в окне Анимация ранее установленные векторы и точки их приложения для каждого вала, а также окно подсказки Добавление элемента к объекту рис. 4.14;
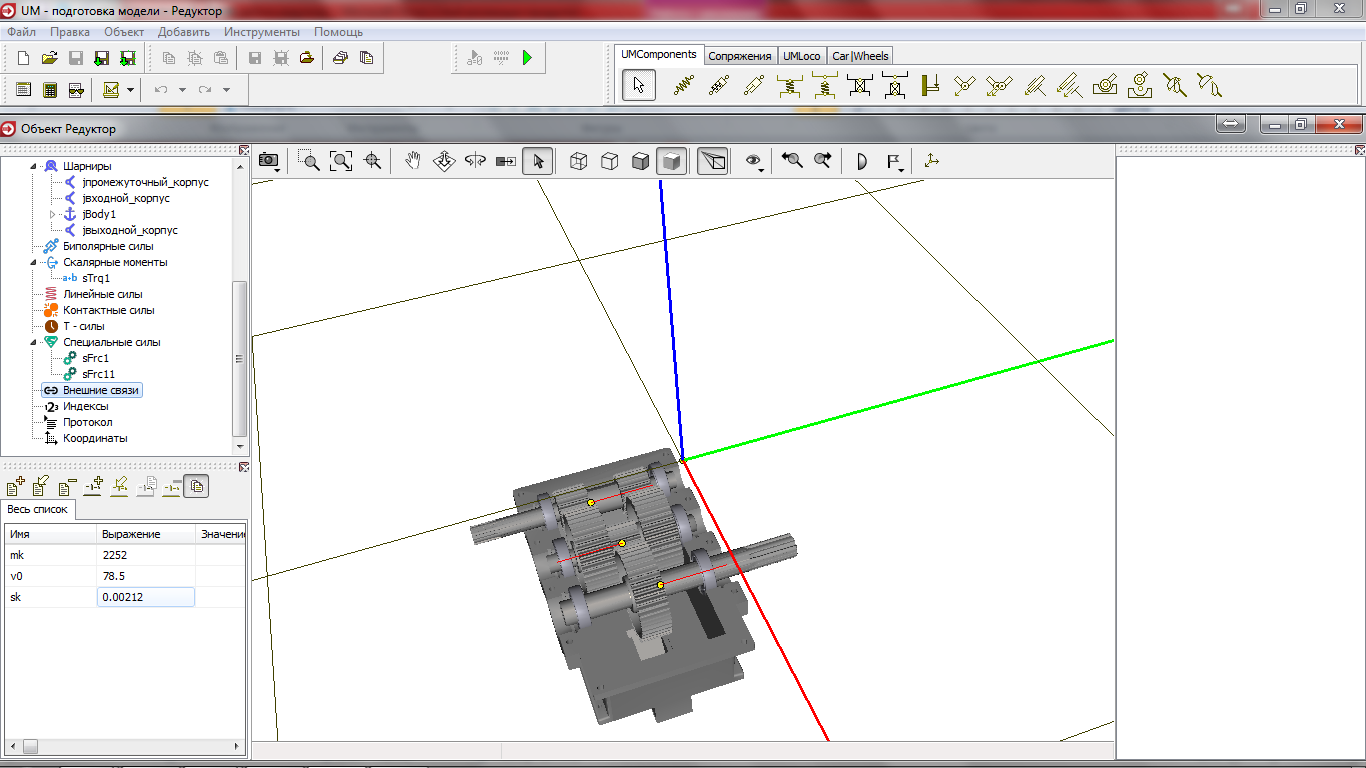
Рис. 4.14. Выбор точек приложения векторов тел первого зубчатого зацепления: Редуктор.Вал1 и Редуктор.Вал2 в окне Анимация
- переместите указатель мыши в точку приложения вектора тела Редуктор Вал1 и, как только появится перекрестие, щелкните мышью. Появится в окне подсказки Добавление элемента к объекту указание Выберите второе тело;
- переместите указатель мыши в точку приложения вектора тела Редуктор Вал2 и, как только появится перекрестие, щелкните мышью. Появятся в окне Инспектор объектов в полях Тело1 и Тело2 в раскрывающихся списках выбранные тела: Редуктор Вал1 и Редуктор Вал2, а в окне Анимация изображения делительных окружностей и векторы тел первого зубчатого зацепления, размеры и направления которых надо уточнить;
- установите в окне Инспектор объекта в разделе Оси вращения нужные (противоположные) направления векторов по осям Z: для вектора тела Редуктор Вал1 (0, 0, 1); для вектора тела Редуктор Вал2 (0, 0, -1);
- введите в поле Передаточное число – значение передаточного числа первой зубчатой пары – 2,3. Зазор – 0. Коэффициенты диссипации - 1×104 и жесткости - 1×106;
- включите переключатель Внешнее зацепление;
- введите галочку (флажок) в квадратик, а затем введите в поле Угол зацепл. значение – 22.767;
- введите в поле Угол трения значение 3 рис. 4.10

Рис. 4.10. Создание специальных сил в зубчатом зацеплении тел: Редуктор.Вал1 и Редуктор.Вал2 в окне Инспектор объекта
- скопируйте координату Z точки приложения вектора тела Редуктор.Вал2, вставить в ту же координату точки приложения вектора тела Редуктор.Вал1, а затем нажмите клавишу Enter. Делительные окружности первого зубчатого соединения будут размещены в одной плоскостирис. 4.11.
Рис. 4.11. Результат создания специальной силы sFrc1 для первого зубчатого зацеплении тел: Редуктор.Вал1 и Редуктор.Вал2 в окнах Анимация и Инспектор объекта
Для создания зубчатых зацеплениймежду валами: Редуктор Вал2 и Редуктор Вал3:
- щелкните на панели инструментов по кнопке Зубчатое зацепление. Появится в окне Анимация ранее установленные векторы и точки их приложения для каждого вала, а также окно Добавление элемента к объекту (см. рис. 4.10);
- переместите указатель мыши в точку приложения вектора тела Редуктор Вал2 и, как только появится перекрестие, щелкните мышью. Появится в окне Добавление элемента к объекту указание Выберите второе тело;
- переместите указатель мыши в точку приложения вектора тела Редуктор Вал3 и, как только появится перекрестие, щелкните мышью. Появятся в окне Инспектор объектов в полях Тело1 и Тело2 в раскрывающихся списках выбранные тела: Редуктор Вал2 и Редуктор Вал3, а в окне Анимация изображения делительных окружностей и векторы тел второго зубчатого зацепления, размеры и направления которых надо уточнить;
- установите в окне Инспектор объекта в разделе Оси вращения нужные (противоположные) направления векторов по осям Z: для вектора тела Редуктор Вал2 (0, 0, -1); для вектора тела Редуктор Вал3 (0, 0, 1);
- введите в поле Передаточное число – значение передаточного числа первой зубчатой пары – 0.5. Зазор – 0. Коэффициенты диссипации - 1×104 и жесткости - 1×106;
- включите переключатель Внешнее зацепление;
- введите галочку (флажок) в квадратик, а затем введите в поле Угол зацепл. значение – 22.767;
- введите в поле Угол трения значение 3 рис. 4.9;
- скопируйте координату Z точки приложения вектора тела Редуктор.Вал3, вставить в ту же координату точки приложения вектора тела Редуктор.Вал2, а затем нажмите клавишу Enter. Делительные окружности второго зубчатого соединения будут размещены в одной плоскостирис. 4.12.

Рис. 4.12. Результат создания специальной силы sFrc11 для второго зубчатого зацеплении тел: Редуктор.Вал2 и Редуктор.Вал3 в окнах Анимация и Инспектор объекта
Задание вращающего момента двигателя
В качестве приводного двигателя примем электродвигатель АИР 132 М8 с параметрами:
– номинальная мощность двигателя, кВт NДВ = 5,5;
– номинальное число оборотов ротора двигателя, об/мин nн = 750;
– перегрузочная способность двигателя λ = 2,2;
– момент инерции ротора, кг·м2 Iр =0,0935;
– масса электродвигателя, кг Gдв = 82;
– частота тока сети, Гц f = 50;
– число пар полюсов двигателя р = 3.
Для определения механической характеристики этого электродвигателя необходимо рассчитать:
– угловую скорость вращения магнитного поля, рад/с

где: f – частота сети, Гц;
p – число пар полюсов двигателя;
–номинальное скольжение

– критическое скольжение

Механическая характеристика электродвигателя, Н·м в аналитическом виде

Для задания вращающегося момента двигателя недостаточно имеющихся возможностей в системе UMExpress, поэтому:
- сохраните динамическую модель, например, под названием Редуктор в данном состоянии с расширением .umd;
- откройте систему UM 8, скачав ее с сайта www.umlab.ru;
- откройте динамическую модель Редуктор.umd;
- щелкните в окне Список элементов по пункту  и по кнопке Добавить новый элемент в окне Инспектор объекта;
и по кнопке Добавить новый элемент в окне Инспектор объекта;
- установите в окне Инспектор объекта в полях ввода тел в качестве первого тела Корпус, а в качестве второго Вал1  ;
;
- щелкните по вкладке Положение, а затем по кнопке Визуальный выбор;
- выберите курсором мышки вектор Корпуса в окне Анимация,который определит локальную систему координат у первого тела;
- отрегулируйте положение момента относительно оси Y, чтобы значок располагался, как показано на рис. 4.13.

Рис. 4.13. Значок момента в анимационном окне
- поставьте галочку перед словом Автоопределение. Система координат второго тела – Вал1 автоматически будет совмещена с системой координат первого - Корпус;
- щелкните по вкладке Описание в окне Инспектор объекта, а затем в выпадающем меню по пункту  . Появится диалоговое окно Редактирования выражения;
. Появится диалоговое окно Редактирования выражения;
- введите формулу вращающего (крутящего) момента двигателя на языке Pascal, а затем щелкните по кнопке Принять рис. 4.14.

Рис. 4.14. Математическая модель момента двигателя
в диалоговом окне Редактирование выражения
Появятся идентификаторы выражения вращающего момента: mk, v0 и sk;
- введите в окне Идентификаторы, расположенном под окном Список элементов,численные значения идентификаторов, которые получили при определении параметров механической характеристики электродвигателя рис. 4.15.

Рис. 4.15. Диалоговое окно Идентификаторы с введенными значениями v0, Mk, Sk
- установите невидимыми все детали мешающими просмотру вращающихся объектов. В нашем случае, это детали, которые входят в объединенное тело Крышка редуктора. Возможный вид редуктора представлен на рис. 4.16.

Рис. 4.16. Вид редуктора в окне Анимация








