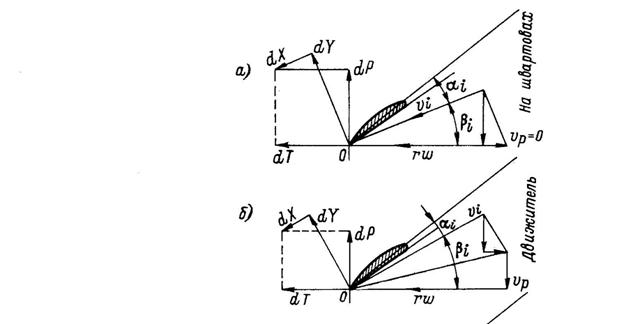
Различные режимы работы гребного винта можно проследить по многоугольнику скоростей (см. рис. 3.25) и кривым действия винта (см. рис. 3.26). Если гребной винт работает в швартовном режиме, т. е. скорость судна и относительная поступь равны нулю, то угол атаки элементов лопастей будет максимальным, что приведет для данного конкретного винта к наибольшим значениям коэффициентов упора и момента при КПД = 0 (рис. 3.27, а). Швартовный режим соответствует случаям посадки судна на мель, остановке при движении во льдах и т. п.
Представим себе судно с работающим гребным винтом, буксируемое другим судном, причем скорость буксировки больше, чем была бы скорость буксируемого судна, если бы оно двигалось своим ходом. Предположим далее, что скорость буксировки увеличивается постепенно, т. е. при постоянных я и О увеличивается относительная поступь КР, а следовательно, и скорость vp. С возрастанием vp увеличиваются углы индуктивной поступи элементов лопастей на всех радиусах и уменьшаются их углы атаки. Но из теории крыла известно, что уменьшение угла атаки приводит к уменьшению коэффициента подъемной силы Су, а следовательно, и к снижению коэффициентов упора К\ и момента /С2. При некотором значении vp проекции сил dX и dY (рис. 3.27, в) на ось Оу окажутся равными по абсолютной величине и упор гребного винта примет нулевое значение (Ki = 0). Относительную поступь Хри соответствующую такому режиму движения, называют поступью нулевого упора. КПД винта при этом обращается в пуль. Абсолютную поступь hpu отвечающую относительной поступи нулевого упора Xph называют обычно шагом нулевого упора или гидродинамическим шагом винта Hi, которому соответствует шаговое отношение нулевого упора HJD. В пределах относительной поступи от λР = 0 до λР = λР1, т. е. от ⱱр = 0 до vp = Hl/n, гребной винт является движителем, развивая положительный упор и имея отличающийся от нуля КПД при вращении с частотой п и затрате мощности на преодоление положительного момента Мр (рис. 3.27, б).
Дальнейшее увеличение Хр приводит к режиму, при котором а, = 0, т. е. направление результирующей скорости потока о,-совпадает с направлением пулевой подъемной силы. Соответ-
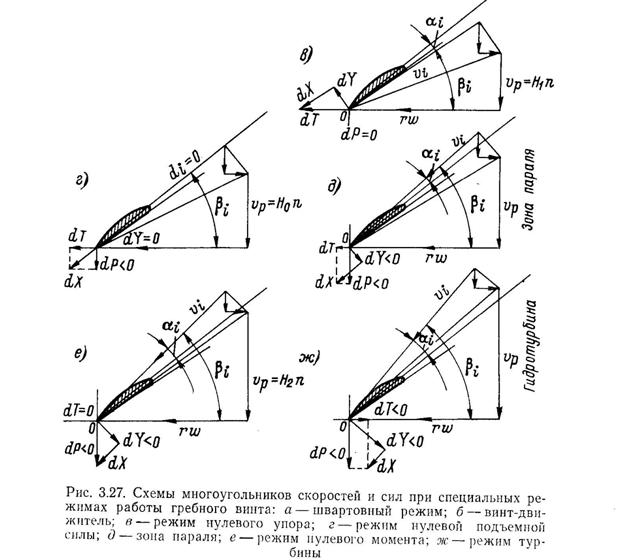
,1 -вующую этому режиму относительную поступь ЯР0 называют поступью нулевой подъемной силы, которой отвечает шаг Н0>Н. В этом режиме момент Мр остается положительным, но упор приобретает отрицательное значение и притормаживает судно (рис. 3.27, г). При дальнейшем увеличении %р наступает режим, при котором угол атаки щ принимает небольшое отрицательное значение, подъемная сила dY также становится отрицательной, а проекции на ось Ох сил dX и dY оказываются равными по абсолютной величине и момент Мр обращается в нуль (рис. 3.27, е). Относительную поступь λР=λР1соответствующую этому режиму, называют поступью нулевого момента, а абсолютную поступь hp2 — шагом нулевого момента H2=H1=H. Работая в режиме нулевого момента, гребной винт свободно вращается, но создает отрицательный упор и притормаживает судно. Таким образом, в пределах относительной поступи от λР=λР2 до λР =λР1 гребной винт уже не является движителем, он как бы «парализован» или находится в так называемой зоне параля (рис. 3.27, д).
Дальнейшее увеличение относительной поступи за предел λР=λР2 и увеличение (по абсолютной величине) отрицательного угла атаки приводит к тому, что не только упор Р, но и момент Мр оказываются отрицательными, т. е. гребной винт из движителя превращается в гидротурбину (рис. 3.27, ж).








