Коэффициент ослабления (подавления) синфазного сигнала (KQOC) является основным параметром ДУ, характеризующим качество его работы. Для того чтобы представить этот параметр, прежде всего, необходимо определить коэффициент усиления по напряжению ДУ для синфазного сигнала Кисф.
При воздействии синфазного сигнала на ДУ можно представить, что его входы соединены друг с другом. Как уже анализировалось в разделе 3, в данном случае резистор RЭ, будет создавать последовательную ООС по току для каждого плеча ДУ (каскада ОЭ). Обычно эту ООС стараются сделать глубокой. Коэффициент усиления плеча для синфазного сигнала можно представить как Киос каскада ОЭ при глубокой ООС с помощью формулы КиОС = - R кн / R э, т.е. для первого плеча K исф1 = R к1 / R э, и для второго — K исф2 = R к2 / R э. Теперь можно записать для K исф всего ДУ:

Из (9) следует основной вывод, который в разд. 3 был сформулирован в виде двух основных требований к ДУ. Действительно, чем лучше симметрия плеч ДУ, тем меньше ∆ R K. Поскольку идеальная симметрия невозможна, то всегда  При заданном
При заданном  , уменьшить K исф можно за счет увеличения глубины ООС, т. е. увеличения R э. Обычно КООС представляется как отношение модулей Кидиф и Ки c ф, выраженное в децибелах, т. е. KOOC=201g (Кидиф / Ки c ф). Раскрыв значения коэффициентов усиления из (6) и (9), можно записать (10):
, уменьшить K исф можно за счет увеличения глубины ООС, т. е. увеличения R э. Обычно КООС представляется как отношение модулей Кидиф и Ки c ф, выраженное в децибелах, т. е. KOOC=201g (Кидиф / Ки c ф). Раскрыв значения коэффициентов усиления из (6) и (9), можно записать (10):

где  — коэффициент асимметрии ДУ. При необходимости коэффициент асимметрии можно дополнить слагаемыми, представляющими разброс других параметров элементов устройства. Напомним, что разброс номиналов резисторов в монолитных ИС не превышает 3%. В ДУ всегда стремятся сделать КООС как можно больше. Для этого следует увеличивать номинал R Э. Однако существует несколько серьезных причин, ограничивающих эту возможность, самая главная из которых заключается в больших трудностях при реализации резисторов значительных номиналов в монолитных ИС. Решить эту проблему позволяет использование электронного эквивалента резистора большого номинала, которым является источник стабильного тока. На рис. 13 приведена принципиальная схема ДУ с ИСТ. Здесь ИСТ выполнен на транзисторе ТЗ. Резисторы R 1, R 2 и R 3, а также диод D служат для задания и стабилизации режима покоя транзистора ТЗ.
— коэффициент асимметрии ДУ. При необходимости коэффициент асимметрии можно дополнить слагаемыми, представляющими разброс других параметров элементов устройства. Напомним, что разброс номиналов резисторов в монолитных ИС не превышает 3%. В ДУ всегда стремятся сделать КООС как можно больше. Для этого следует увеличивать номинал R Э. Однако существует несколько серьезных причин, ограничивающих эту возможность, самая главная из которых заключается в больших трудностях при реализации резисторов значительных номиналов в монолитных ИС. Решить эту проблему позволяет использование электронного эквивалента резистора большого номинала, которым является источник стабильного тока. На рис. 13 приведена принципиальная схема ДУ с ИСТ. Здесь ИСТ выполнен на транзисторе ТЗ. Резисторы R 1, R 2 и R 3, а также диод D служат для задания и стабилизации режима покоя транзистора ТЗ.
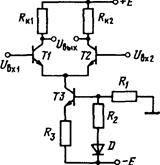
Рис. 13
Напомним, что для реальных условий ИСТ представляет собой эквивалент сопротивления для изменяющегося сигнала (в нашем случае синфазного) большого номинала — до единиц мегаом. Кроме того, в режиме покоя ИСТ представляет собой относительно небольшое сопротивление (порядка единиц килоом), из-за чего и все устройство будет потреблять от источников питания относительно небольшую мощность. Таким образом, использование ИСТ в ДУ позволяет реализовать усилитель в виде экономичной монолитной ИС, имеющей большой КООС. Современные ДУ могут быть выполнены по различным схемам, но в них всегда используется ИСТ. Для таких ДУ значения КООС обычно лежат в пределах 60...100дБ.








