Определим степень подвижности механизма по формуле Чебышева:
W = 3n – 2P5 – P4
n – число подвижных звеньев;
P5 – число кинематических пар пятого класса (низшие кинематические пары);
Р4 – число кинематических пар четвертого класса (высшие кинематические пары).
Для данного механизма:
n = 5, P5 = 7, P4 = 0, тогда W = 3*5 – 2*7 – 0 = 1.
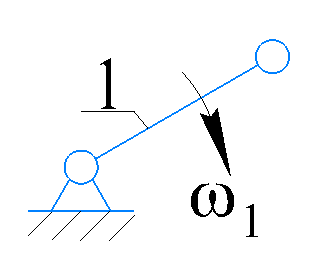
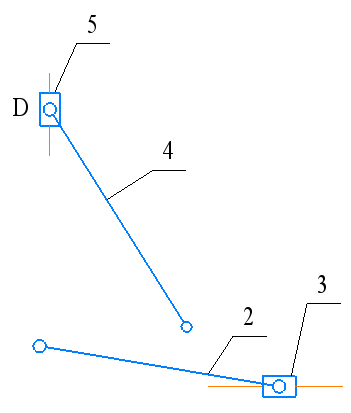
Разложение механизма на группы Ассура и входное звено показаны на рис. 1.
| 
|
| Механизм 1-го класса
| Группа Ассура 222(2,3), 222(4,5)
|
Рисунок 2 – Схема разложения механизма
Планы скоростей
В масштабе m вычерчиваем планы положений механизма в 12 рассматриваемых равностоящих положениях кривошипа.
Скорость точки B: Скорость точки D:
В этих уравнениях одной чертой подчеркнуты векторы, известные по направлению, двумя − известные по величине и по направлению.
1.4 Планы ускорений
Расчеты были проведены в SMath Studio. См. Приложение А.
Ускорение точки A:

Рассмотрим ускорение точки B:

1.5 Кинематические диаграммы
Расчеты были проведены в SMath Studio. См. Приложение А.
1.6 Сравнительный анализ результатов
Расчеты были проведены в SMath Studio. См. Приложение А.
ПРОЕКТИРОВАНИЕ ЗУБЧАТОЙ ПЕРЕДАЧИ
Схема механизма
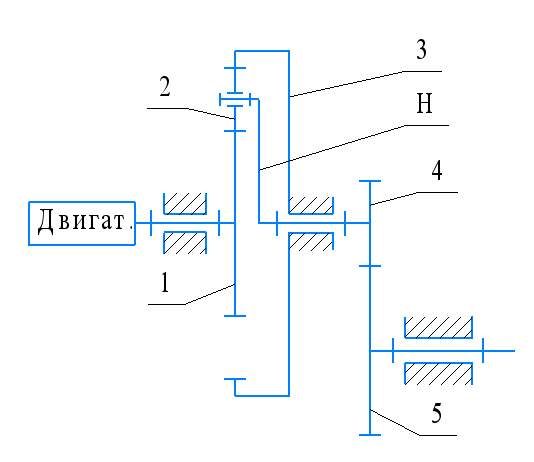
Рисунок 3 - Редуктор
Для механизма редуктора дано:



Расчет простой ступени
2.2.1 Подбор чисел зубьев простой ступени
Расчеты были проведены в SMath Studio. См. Приложение А.
Расчет геометрии зацепления
Расчеты были проведены в SMath Studio. См. Приложение А.
Определение качественных показателей зацепления
Расчеты были проведены в SMath Studio. См. Приложение А.
2.3 Расчет планетарной ступени
2.3.1 Подбор чисел зубьев планетарной ступени
Расчеты были проведены в SMath Studio. См. Приложение А.
Проверка передаточного отношения и условий соосности, соседства
Расчеты были проведены в SMath Studio. См. Приложение А.
Линейные и угловые скорости передачи
Расчеты были проведены в SMath Studio. См. Приложение А.
2.5 Сравнительный анализ результатов и КПД передачи
Расчеты были проведены в SMath Studio. См. Приложение А.
3 ПРОЕКТРИРОВАНИЕ КУЛАЧКОВОГО МЕХАНИЗМА
Схема механизма
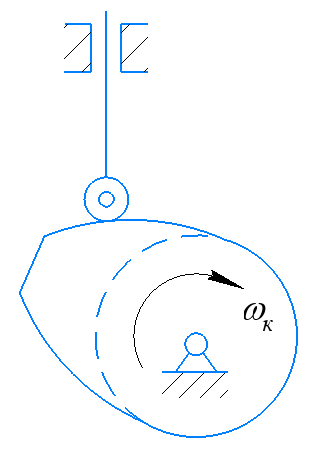
Рисунок 4 – Кулачковый механизм
Для механизма даны:
Закон движения толкателя

h = 0,012 м; 
3.2 Аналитическое описание закона движения ведомого звена (аналитическое интегрирование) и расчет
Изменение аналога ускорения ведомого звена задаётся постоянных ускорений:

После двукратного интегрирования и определения постоянных с1, с2 и a, получаем

Максимальный аналог ускорения при  ;
;
 .
.
Максимальный аналог ускорения при  ;
;
 .
.
Максимальный аналог скорости при  ;
;
 .
.
На фазе возвращения справедливы эти же формулы, только  заменяют на
заменяют на  :
:

 При построении графиков зависимости перемещения, скорости и ускорения от угла поворота
При построении графиков зависимости перемещения, скорости и ускорения от угла поворота  используем результаты расчетов компьютерной программы L_TMM на ЭВМ.
используем результаты расчетов компьютерной программы L_TMM на ЭВМ.
| Таблица 1 - Результаты расчета на ЭВМ (по углу удаления)
|
| ТЕКУЩИЕ ЗНАЧЕНИЯ:
|
| Угла удаления (возвращения)
| Перемещения
| Аналога скорости
| Аналога ускорения
|
| F
| S
| V
| W
|
| 0,000000
| 0,0000000
| 0,0000000
| 0,0321584
|
| 0,152716
| 0,0003750
| 0,0049111
| 0,0321584
|
| 0,305431
| 0,0015000
| 0,0098222
| 0,0321584
|
| 0,458147
| 0,0033750
| 0,0147333
| 0,0321584
|
| 0,610863
| 0,0060000
| 0,0196443
| 0,0321584
|
| 0,763578
| 0,0086250
| 0,0147333
| 0,0321584
|
| 0,916294
| 0,0105000
| 0,0098222
| 0,0321584
|
| 1,069010
| 0,0116250
| 0,0049111
| 0,0321584
|
| 1,221726
| 0,0120000
| 0,0000000
| 0,0321584
|
| МАХ. ЗНАЧЕНИЯ АНАЛОГА УСКОРЕНИЯ 0,03216
|
| Таблица 2 - Результаты расчета на ЭВМ (по углу возвращения)
|
| ТЕКУЩИЕ ЗНАЧЕНИЯ:
|
| Угла удаления (возвращения)
| Перемещения
| Аналога скорости
| Аналога ускорения
|
| F
| S
| V
| W
|
| 0,000000
| 0,0000000
| 0,000000
| 0,0194538
|
| 0,196349
| 0,0003750
| 0,0038197
| 0,0194538
|
| 0,392698
| 0,0015000
| 0,0076395
| 0,0194538
|
| 0,589046
| 0,0033750
| 0,0114592
| 0,0194538
|
| 0,785395
| 0,0060000
| 0,0152789
| 0,0194538
|
| 0,981744
| 0,0086250
| 0,0114592
| 0,0194538
|
| 1,178093
| 0,0105000
| 0,0076395
| 0,0194538
|
| 1,374441
| 0,0116250
| 0,0038197
| 0,0194538
|
| 1,570790
| 0,0120000
| 0,0000000
| 0,0194538
|
| МАХ. ЗНАЧЕНИЯ АНАЛОГА УСКОРЕНИЯ 0,01945
|







