Моделирования нелинейной системы»
Цель работы: Знакомство с методологией нечеткого моделирования. Описание заданной нелинейной функции множеством правил вида ЕСЛИ-ТО.
Теоретическая часть
Знакомство с методологией нечеткого моделирования. Описание предметной области может быть проведено посредством лингвистических переменных и правил естественного языка, содержащих качественную оценку ситуации. Основой для описания ситуации является нечеткое высказывание следующего вида:
xi есть Xi или xi = Xi,
где xi – некоторая величина, Xi – элемент терм-множества лингвистической переменной из исследуемой предметной области.
Нечеткая система выполняет отображение из входного пространства m A Ì Â в выходное пространство r B Ì Â. Такая система является системой типа «много_входов – много_выходов» (MIMO – multiple_input-multiple_output). Если система имеет m входов и r выходов и входное и выходное пространства являются многомерными, то входное пространство определяется как A = A ´ … ´ Am, а выходное пространство – как B = B ´ … ´ Br, где Ai,Bj Ì Â. Обозначим a = [a1 a2 … am]T и b = [b1 b2 … bm]T как входной и выходной векторы, соответственно. Отображение вход/выход может быть представлено как множество нечетких правил типа «ЕСЛИ-ТО». Каждое правило состоит из двух частей: условной и заключительной. Антецедент или условная часть (ЕСЛИ-часть) содержит утверждение относительно значений входных переменных, в консеквенте или заключительной части (ТО-части) указываются значения, которые принимают выходные переменные. Таким образом, нечеткая система типа «много_входов – много_выходов» может быть задана нечеткими правилами следующего вида:
Правило 1: ЕСЛИ a1 = A11 И a2 = A21 … am = Am1 ТО b1 = B11 И b2 = B21 И … И br = Br1;
Правило 2: ЕСЛИ a1 = A12 И a2 = A22 … am = Am2 ТО b1 = B12 И b2 = B22 И … И br = Br2;
……….………………………………………………………………………
Правило n: ЕСЛИ a1 = A1n И a2 = A2n … am = Amn ТО b1 = B1n И b2 = B2n И … И br = Brn;
где a1, a2, …, am – входные переменные, b1, b2, …, br – выходные переменные, Ait и Bjs – нечеткие области определения входных и выходных переменных, которые определены на универсальных множествах X1, X2,…, Xm, Y1, Y2, …, Yr, соответственно. Каждая нечеткая область Ait связана с функцией принадлежности mAit(ai).
Вход A нечеткой системы активизирует каждое из правил, хранимых в нечеткой ассоциативной памяти. Чем больше вход A соответствует антецеденту i-го правила, тем больше выход соответствует консеквенту этого правила.
Весьма популярными в практическом применении в настоящее время являются нечеткие системы типа «много_входов – один_выход». Система такого типа выполняет отображение из входного пространства A Ì Âm в выходное пространство B Ì Â. Известно два основных типа нечетких систем «много_входов –один_выход».
Системы типа Мамдани имеют правила:
Правило i: ЕСЛИ a1 = A1i И a2 = A2i … И am = Ami ТО bi = Bi;
Другой тип – системы типа Сугено с правилами следующего вида:
Правило i: ЕСЛИ a1 = A1i И a2 = A2i … am = Ami ТО bi = fi(a1,… am); где fi – функция, определенная на переменных a1 … am.
Для описания отображения входного вектора a в значение b используются методы нечеткой логики, например, аппроксимация Мамдани или метод, основанный на формальном логическое доказательстве. В процессе вывода участвуют операции конъюнкции и дизъюнкции. Задание этих операций на основе триангулярных норм позволяет более гибко настраивать нечеткую систему на исследуемую предметную область.
В общем случае процесс создания нечетких систем состоит из следующих шагов:
1) определение входных и выходных переменных системы;
2) задание функций принадлежности каждой переменной;
3) определение нечетких правил;
4) настройка параметров функций принадлежности и нечетких правил.
При разработке базы правил необходимо руководствоваться следующими принципами:
1) в базе правил существует правило для всяких сочетаний A1i, A2i, …, Ami, Bi;
2) нет двух и более правил с одинаковым антецедентом и различным консеквентом.
Для осуществления вывода в такой системе можно воспользоваться композиционным правилом. Однако предварительно нужно выполнить операции конъюнкции (И) и далее операцию объединения (агрегации) n правил.
Пусть на вход системы поступают четкие значений x1, x2. Требуется определить четкий выход y. Для этого необходимо выполнить следующие операции:
1) фаззификация – для каждого правила вычисляется значения mA1i(x1) и mA2i(x2);
2) конъюнкция – объединение посылок в антецеденте каждого правила, используя t-нормальную функцию, получим T(mA1i(x1), mA2i(x2));
3) импликация – I(T(mA1i(x1), mA2i(x2)), mBi(y));
4) агрегация – получение нечеткого выходного значения из множества объединенных правил, то есть определение итоговой функции принадлежности mBi(y).
5) дефаззификация - преобразование итоговой функции принадлежности mBi(y) в четкое значение y.
Структура нечеткой системы моделирования представлена на рисунке 1.

Рисунок 1 – Структура нечеткой системы моделирования
Пример: Описание заданной нелинейной функции множеством правил вида ЕСЛИ-ТО.
Пусть дана функция F(x) = sin(x) и следующие области изменения 0<x<y (Рисунок 2).

Рисунок 2 – Пример нелинейной функции
Лингвистические переменные, описывающие x и F, определены на следующем множестве термов: {очень малая, малая, средняя, большая, очень большая}. Функции принадлежности для указанных термов приведены на рисунках 3 и 4. Тогда нечеткая система моделирования указанной нелинейной функции будет задана следующей базой правил:
ЕСЛИ x = очень малая ТО F = средняя,
ЕСЛИ x = малая ТО F = очень большая,
ЕСЛИ x = средняя ТО F = средняя,
ЕСЛИ x = большая ТО F = очень малая,
ЕСЛИ x = очень большая ТО F = средняя.

Рисунок 3 – Пример функций принадлежности для переменной x

Рисунок 4 – Пример функций принадлежности для переменной F
Практическая часть
Задание:
1. Используя пакет Matlab, построить график выбранной нелинейной функции.
2. Выбранную нелинейную функцию описать базой правил для лингвистических переменных, описывающих x и F, определенных на множестве из пяти и девяти термов.
Вариант 4 – функция z=x2-y2; Область изменения x=-4<x<4; y=-4<y<4; z=-4<z<4. Так как в области изменения была найдена не точность, z была изменена на z=-16<z<16.
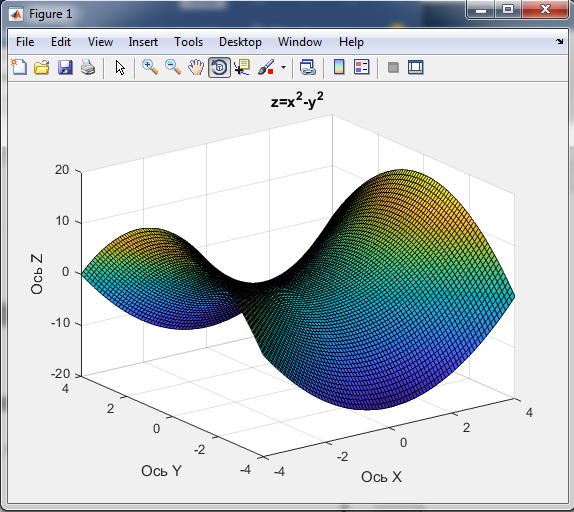
Рисунок 5
График функции построен с помощью MathLab:
%Построение графика функции z=x^2-y^2
[X,Y]=meshgrid(-4:0.1:4);
Z=X.^2.-Y.^2;
surf(X,Y,Z);
xlabel("Ось X");
ylabel("Ocь Y");
zlabel("Ось Z");
title("z=x^2-y^2");

Рисунок 6 – Модель Мамдани в Mathlab для функции z = x2-y2

Рисунок 7 – Параметры нечетких множеств для входа Х для 7 термов

Рисунок 8 – Параметры нечетких множеств для входа Y для 7 термов
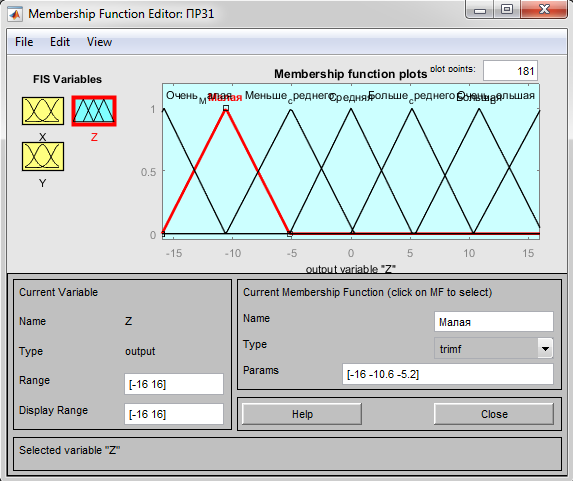
Рисунок 9 - Параметры дефазификации модели для 7 термов

Рисунок 9 – Правила вывода разрабатываемой модели

Рисунок 10 – Результат построения модели
Вывод: В данной практической работе были изучены методологии нечеткого моделирования. Описание заданной нелинейной функции множеством правил вида ЕСЛИ-ТО по типу вывода Мамдани.
Практическая работа №4








