Основная задача, стоящая на данном этапе проектирования, заключается в составлении иерархии графов операций (сетей Петри), описывающих поведение РКК. Операции, реализуемые в комплексе, будем подразделять на простейшие и составные. К простейшим операциям относятся действия, инициированные однократным изменением значений логических переменных I,Z,G, а также выполнение сдвига содержимого лент в следящей модели и других математических операций. Формально простейшей является также "пустая" операция, соответствующая ожиданию ("пустая" позиция сети). Составные операции представляют собой совокупность простейших.
На верхнем уровне иерархической системы сетей большинство позиций соответствует составным операциям, т.е. являются стратифицированными. Они раскрываются сетями нижестоящего уровня иерархии, причем процесс раскрытия продолжается до тех пор, пока не будут получены сети, позиции которых соответствуют только простейшим операциям.
Разобьем управление РКК и соответствующую сеть Петри на три иерархических уровня:
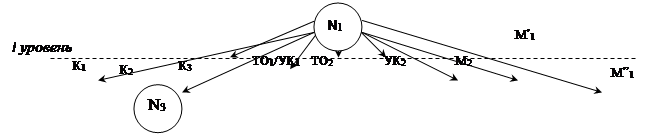
I. Управление РКК;
II. Управление агрегатами;
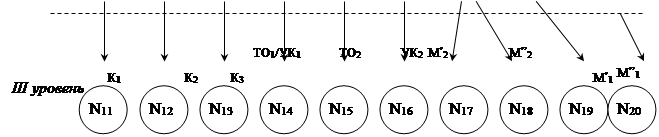
III. Движение агрегатов.
Сеть первого уровня показывает общую синхронизацию работы агрегатов и разбивку цикла управления на такты. Сети второго уровня определяют логику запуска агрегатов и соответствующие варианты их работы. Сети третьего уровня описывают движение исполнительных механизмов.
Такая разбивка позволяет более компактно и наглядно изобразить процесс и оптимально (в функциональном смысле) реализовать его в общем случае различными средствами (программными или аппаратными).
Для наглядности и удобства представим иерархию сетей в виде дерева их отношений:

После составления модели процесса управления производятся математическое описание и анализ полученной сети.
На самом верхнем, I уровне управление производится по следующему алгоритму:
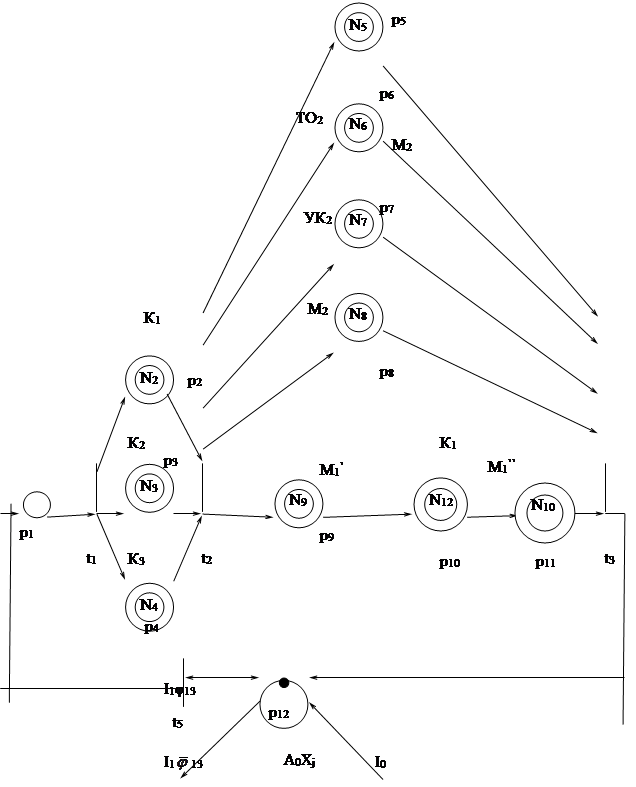
В комплексе, данном по условию задания, последовательно выполняемые технологические операции имеют различную длительность (отличающуюся в два раза). Для устранения задержки технологи "расшивают" узкое место, ставя параллельно два конвейера с идентичными "медленными" агрегатами. При этом получается данная схема РКК, где перемещение К1 в два раза выше, чем К2 и К3.
За общий цикл работы данной схемы два раза сдвигается конвейер К1 один раз отрабатывают агрегаты ТО1/УК1, ТО2 и УК2, один раз сдвигаются конвейеры К2 и К3. Манипуляторы М1 и М2 также имеют две последовательные фазы работы.
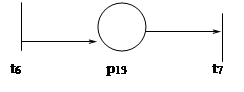
Если при включенном комплексе в начале цикла какой-либо из механизмов не находится в исходном положении, то I1  13=1, открывается переход t6 и маркер попадает в позицию р13. При этом оператору выдается сигнал А0 об аварии и показания всех датчиков исходного положения. После устранения неисправности и нажатия кнопки послеаварийного пуска I0=1,открывается переход t7 и маркер возвращается в р12.
13=1, открывается переход t6 и маркер попадает в позицию р13. При этом оператору выдается сигнал А0 об аварии и показания всех датчиков исходного положения. После устранения неисправности и нажатия кнопки послеаварийного пуска I0=1,открывается переход t7 и маркер возвращается в р12.
Если I1φ13=1, то через цепочку t5 – p1 – t1 маркер попадает в позиции р2, p3, p4, инициируя одновременную работу конвейеров К1, К2 и К3.