1ᵒ Кулачковые механизмы можно подразделить на следующие основные типы:
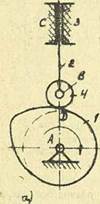
I. Кулачок 1 входит во вращательную кинематическую пару А со стойкой 3 (рис. 131), штанга 2 входит в кинематическую пару 4-го класса с кулачком.
Рис. 131. Кулачковые механизмы с вращающимся кулачком: а — с возвратно-поступательным движением штанги; б — с возвратно-вращательным движением штанги; в — со сложным движением штанги.
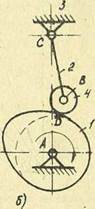
II. Кулачок 1 входит во вращательную кинематическую пару А со стойкой 3 (рис. 132), штанга 2 связана с кулачком гибким звеном 4,
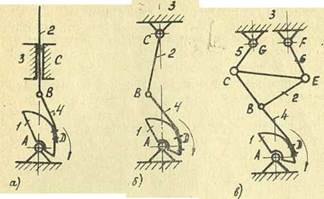
Рис. 132. Кулачковые механизмы с вращающимся кулачком и гибким звеном: а — с возвратно-поступательным движением штанги; б — с возвратно-вращательным движением штанги; в — со сложным движением штанги.
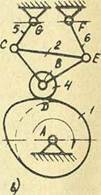
III. Кулачок 1входит в поступательную кинематическую пару А со стойкой 3 (рис. 133), штанга 2 связана входит в кинематическую пару 4-го класса скулачком.
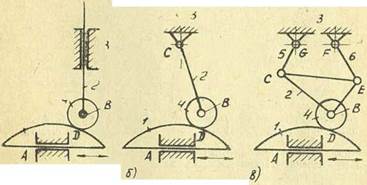
Рис. 133. Кулачковые механизмы с поступательным движениемкулачка:
а — с возвратно-поступательным движением штанги; б — с возвратно-вращательным движением штанги;
в — со сложным движениемштанги.
IV. Кулачок 1входит в поступательную кинематическую пару А со стойкой 3, штанга 2 связана с кулачком гибким звеном 4.
Кулачковые механизмы I и III типов называются механизмами с жесткими звеньями, а II и IV — с гибкими звеньями.
Теория механизмов II и IV типов подробно разработана в диссертации ст. преподавателя кафедры ТММ ВЗМИ В.А. Пименова В работе показано, что каждому кулачковому механизму с гибким звеном можно найти эквивалентный с жесткими звеньями, поэтому к ним (к кулачковым механизмам с гибкими звеньями) применимы методы кинематического анализа и синтеза, разработанные для механизмов с жесткими звеньями.
Для кулачковых механизмов I и III типов элементами кинематической пары 4-го класса на штанге могут быть: а) острие — точка В или круглый ролик (рис. 134, а), б) тарелка — плоскость хх (рис. 134,6), грибок — любая кривая хх (рис. 134, в).
Форма профиля кулачка для всех типов этих механизмов находится одним и тем же методом, поэтому мы рассмотрим только следующие типы: I, а с роликом на штанге; I, а с тарелкой на штанге; I, б с роликом на штанге (рис. 131, а и б; рис. 134, а и б).
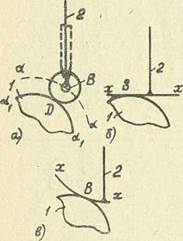 Рис. 134. Элементы кинематической пары четвертого класса
на штанге:
а — острие (точка) или круглый ролик;
б — плоская тарелка; в — грибок.
Рис. 134. Элементы кинематической пары четвертого класса
на штанге:
а — острие (точка) или круглый ролик;
б — плоская тарелка; в — грибок.
| 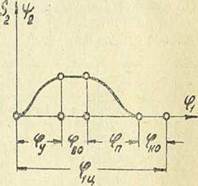 Рис.135. График функции положения штанги
Рис.135. График функции положения штанги
|
2ᵒ. Приступая к проектированию кулачкового механизма, надо располагать такими данными: принципиальной схемой механизма, законами движения кулачка и штанги, некоторыми начальными размерными параметрами.
Применительно к кулачкам I типа закон движения кулачка задают обычно в форме ω1= const,
т. е. считают, что он движется равномерно. Для штанги надо знать: фазовые углы и функцию
положения ее (рис. 135) для каждой фазы движения S2 = S2(φ1) (тип I, а) и ψ2=ψ2(φ1)(тип I, б).
Различаются следующие фазы движения штанги: фаза удаления, когда штанга удаляется от вала кулачка, этой фазе отвечает угол поворота кулачка φу; фаза верхней остановки, когда штанга стоит в наибольшем удалении от вала кулачка, этой фазе соответствует угол φво; фаза приближения, когда штанга приближается к валу кулачка, ей отвечает угол φп; фаза нижней остановки, она определяется углом φно.
Цикл работы механизма нами принят равным одному обороту кулачка.
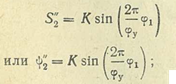
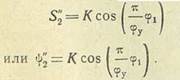
Вместо функции положения штанги иногда задают ее вторую производную для каждой фазы движения: S''2= S''2(φ1) илиψ''2=ψ''2(φ1), а также максимальный ход штанги S2max или ψ2max.
Наиболее характерные графики второй производной от функции положения штанги показаны на рис. 136:
а) вторая производная постоянна (рис. 136, а)
 б) вторая производная изменяется по закону синуса (рис. 136, б)
б) вторая производная изменяется по закону синуса (рис. 136, б)
 (132 а)
в) вторая производная изменяется по закону косинуса (рис. 136, в) (132 а)
в) вторая производная изменяется по закону косинуса (рис. 136, в)
 (132 б) (132 б)
| 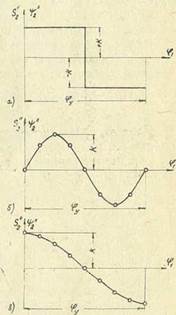 Рис. 136. Типы второй производной от
функции положения штанги:
а - постоянная величина; б - изменяется по закону синуса;
в -изменяется по закону косинуса.
Рис. 136. Типы второй производной от
функции положения штанги:
а - постоянная величина; б - изменяется по закону синуса;
в -изменяется по закону косинуса.
|
Для нахождения значения функции положения дважды интегрируют заданную вторую производную. При интегрировании учитывают следующие начальные и граничные условия: при φ1=0S'2 = 0 и при φ1=φyS2=S2max, соответственно при φ1=0 ψ'2=0ипри φ1=φy, ψ2=ψ2max.
Задавать движение штанги второй производной от функции положения ее целесообразно потому, что мы тем самым задаем ускорения штанги. Для штанги, движущейся поступательно, ее ускорение по формуле (22) а2 = S''2ω21 , а для вращающейся поформуле (23) ɛ2 = ψ̍'2ω21.
По известному ускорению штанги всегда может быть подсчитано ее инерционная нагрузка | Р и2 | = т2а2 или | М и2| = I 2ɛ2 и найдено динамическое воздействие штанги на кулачок.
3°. Проектирование профиля кулачка — графическое решение (решение будет рассмотрено только для фазы удаления).
Для всех кулачковых механизмов применим универсальный прием проектирования — метод обращения движения. Этот метод заключается в том, что всему механизму сообщают скорость обратную по знаку скорости кулачка. Тогда кулачок, как бы остановится, а стойка вместе со штангой начинает двигаться относительно кулачка (штанга относительно стойки сохраняет свое движение, определяемое функцией положения).