ПИ-регулятор, у которого изменение выходной величины ∆Х вых. пропорционально изменению входной величины ∆Х вход. и интегралу от изменения входной величины ΔХвх. :
ΔХвых.= Кр * ∆Х вход + (1/Ти) * ∫ΔХвх.dt
Зависимость изменения во времени выходной величины у таких регуляторов при скачкообразном изменении входной величины имеет вид.
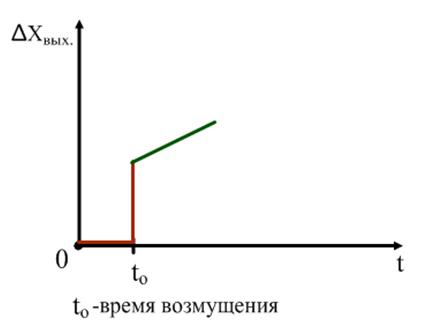
Рисунок 12
ПИ-регулятор сочетает одновременно свойства пропорционального и интегрального регуляторов.
ПИ-регуляторы конструктивно более сложны, чем П- и И-регуляторы, требуют более сложной наладки, так как она осуществляется настройкой двух параметров.
Пропорционально-дифференциальный регулятор
ПД-регулятор, у которого изменение выходной величины ∆Х вых. пропорционально изменению входной величины ∆Х вход и скорости изменения входной величины ∆Х вход:
∆Х вых = Кр * ∆Х вход + Тд* (d∆Х вход/dt),
где Тд- параметр настройки регулятора, время дифференцирования, время предварения.
Зависимость изменения во времени выходной величины у таких регуляторов при скачкообразном изменении входной величины имеет вид.

Рисунок 13
Введение в пропорциональный регулятор дополнительно сигнала по скорости изменения регулируемой величины связано с тем, что в начальный момент возмущения скорость отклонения регулируемой величины более значительна, чем само отклонение. Кроме того, такой регулятор учитывает направление изменения отклонения.
Поскольку введение воздействия по производной позволяет определять темп и направление отклонения еще до того, как оно стало достаточно ощутимой величиной, такое воздействие называют предварением. В некоторых случаях эти регуляторы позволяют значительно улучшить процесс регулирования.
Пропорционально-интегрально-дифференциальный регулятор
ПИД-регулятор, у которого изменение выходной величины ∆Х вых. пропорционально изменению входной величины ∆Х вход интегралу от изменения входной величины ∆Х вход и скорости изменения входной величины ∆Х вход:
∆Х вых = Кр * ∆Х вход + (1/Ти) * ∫ΔХвх.dt + Тд* (d∆Х вход/dt)
Зависимость изменения во времени выходной величины у таких регуляторов при скачкообразном изменении входной величины имеет вид.

Рисунок 14
ПИД-регуляторы наиболее сложны в конструктивном отношении и наладке, так как содержат три параметра настройки. Они являются наиболее универсальными и сочетают в себе свойства всех перечисленных регуляторов. ПИД-регуляторы позволяют получить высококачественные САР для большинства технологических процессов.
Оптимальные параметры настройки регуляторов должны выбираться таким образом, чтобы они соответствовали динамическим показателям системы НПС, для различных режимов работы НПС.
Виды регулирующих органов
Непосредственное регулирующее воздействие оказывает исполнительное устройство. В нём происходит преобразование сигналов, поступающих от САР (блок селекции сигналов) в механическое движение. Исполнительное устройство состоит из двух основных частей: исполнительного механизма (привод) и регулирующего органа (заслонка).

Привод должен обеспечивать достаточное перемещение регулирующего органа поступательное или вращательное. Он должен развивать достаточное усилие, а также преодолевать воздействие сил трения при перемещении регулирующего органа и перепад давления. Привод должен перемещать затвор с достаточной скоростью. В зависимости от вида энергии исполнительные механизмы делятся на: пневматические, гидравлические, электрические, ручные, комбинированные.
Регулирующий орган – это часть исполнительного устройства, помещенного в трубопровод для создания переменного гидравлического сопротивления.
Для регулирования давления в трубопроводах больших диаметров используются ПРЗ (поворотно-регулирующая заслонка). В ПРЗ проходное сечение меняется при повороте диска, сидящего на оси перпендикулярной направлению потока жидкости.
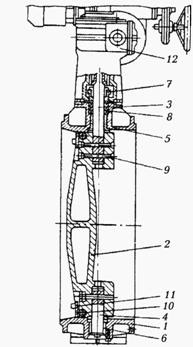
Рисунок 15 Поворотно-регулирующая заслонка с электрическим исполнительным механизмом и ручным дублером
1-корпус; 2-диск; 3-вал; 4-ось; 5и6-опоры; 7- нажимной фланец; 8-уплотнительные кольца; 9-штифт; 10-резиновое кольцо;
11-прижимное кольцо; 12-ручной дублер
Конструкция ПРЗ представляет собой корпус (1) в виде кольца небольшой ширины, которое зажимается между фланцами трубопровода. Внутри кольца находится диск (2). Из-за неравномерного распределения скоростей жидкости на диск действует крутящий момент со стороны потока жидкости, который стремится повернуть его и закрыть проходное сечение трубопровода. Для снижения крутящего момента устанавливают специальный профилированный диск. Для более пропорционального регулирования давления на больших углах поворота на диск устанавливают «рыбий» хвост, который также снижает крутящий момент.
Электропривод перемещает диск при помощи электродвигателя через редуктор. Управление осуществляется специальным блоком. После перемещении диска до требуемого положения подача напряжения на обмотки электродвигателя прекращается. Диск в заданном положении останавливается электромагнитным тормозом и удерживается исполнительным механизмом.








