Теоретическая значимость работы: Описание теоретической значимости (ценности) результатов исследования должно присутствовать во введении...
Интересное:
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Уполаживание и террасирование склонов: Если глубина оврага более 5 м необходимо устройство берм. Варианты использования оврагов для градостроительных целей...
"Роботы для склада" - это автономные механизмы, которые выполняют СОВМЕСТНУЮ работу на складе по отгрузке и перемещению грузов.
Участие: командное, 1 команда - 2 человека.
Оборудование:
На команду (2 человека) выдается 2 базовых набора конструктора WEDO 2.0 для выполнения задания, по условию задания нужно построить 2 конструкции с 1 мотором.
Основное задание:
Сконструировать 2 роботов для совместной работы на складе. После запуска программ роботы должны выполнить работу автономно (т.е. без помощи операторов-участников).
Задача 1-го робот выехать с места старта включить конвейерную ленту, на которой располагается груз, и выключить ее после того как груз будет загружен на 2 робота, приехать на финиш.
Задача 2-го робота выехать с места старта, остановиться под конвейерной лентой, загрузить груз и приехать на финиш. Роботы стартуют одновременно, т.е. со старта начинают двигаться одновременно.
Задание на поле выполняется на время, время засекается секундомером и плюсуется с итоговыми баллами.
Описание поля:
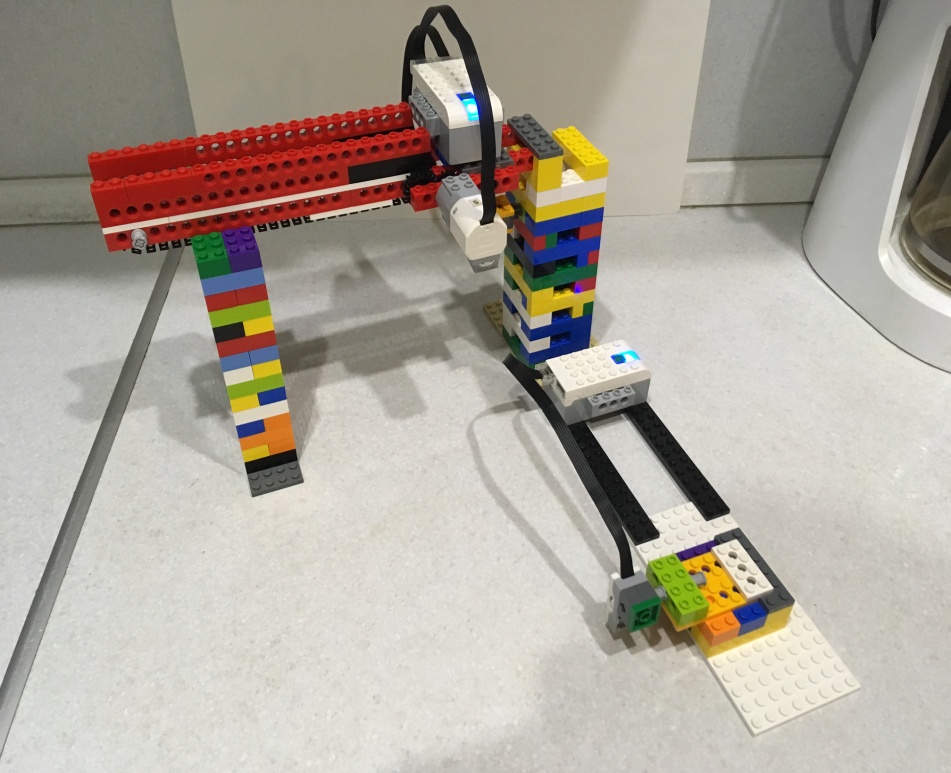
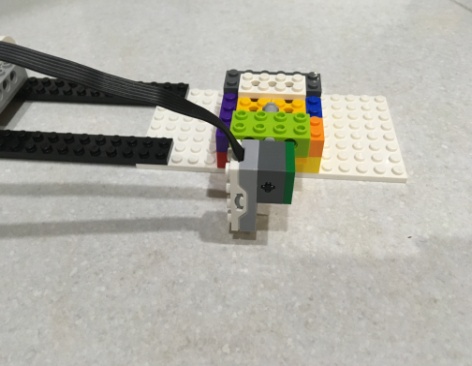
Поле имеетдополнительные конструкции, с помощью которых выполняется задание на складе. Они собираются по карте сборки "Склад".
Дополнительные конструкции склада:
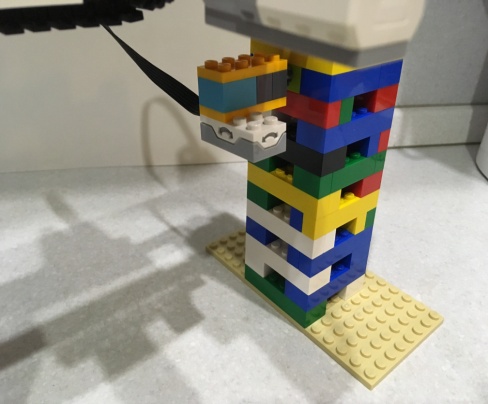
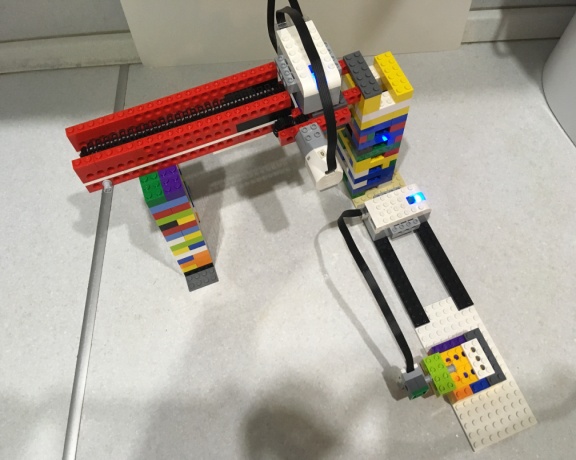
Склад строится 1 на всех команды, для его строительства необходимы: 2 блока управления, 1 мотор, 2 датчика наклона. В конструкцию склада входит:
1 - датчик наклона 1 - кнопка "включения", подключается к 1 блоку управления
2 - датчик наклона 2 - кнопка "выключения", подключается ко 2 блоку управления
3 - мотор для вращения конвейерной ленты, подключается ко 2 блоку управления
Остальные элементы склада строятся из дополнительных кирпичиков
3
1
2
Описание поля:
Общий размер поля с заданием: 1800х800 мм
Синим обозначены зоны старта для 1 и 2 робота (1 робот стартует со СТАРТА 1, 2 робот со СТАРТА 2), роботы на старте ставится на границе старта и начала склада, каждый участник сам выставляет своего робота. Роботы должны стартовать ОДНОВРЕМЕННО. Для ориентира робота 1 на поле наносится красная линия, эта линия расположения датчиков наклона, одни должны располагаться строго над этой линией. Размер зоны старта составляет - 350 (ш) х 350 (д) мм.
"Оранжевый 1" - место расположение кнопки "Включение", расстояние от старта до кнопки 20 см. Рабочее положение датчика наклона - строго вниз. Робот 1 с помощью статичного приспособления должен изменить положение датчика наклона в любую сторону, это будет считаться "Включением".
"Оранжевым 2" обозначено место кнопки "Выключение". Рабочее положение датчика наклона - строго горизонтально. Робот 1 с помощью статичного приспособления должен изменить положение датчика наклона в любую сторону, это будет считаться "Выключением".
"Оранжевым 3" - расположение конвейерной ленты, по которой будет двигаться груз. Лента движется от блок управления.
От конвейерной ленты до ФИНИША 1 и СТАРТА 2 расстояние 50 см.
Макет поля:
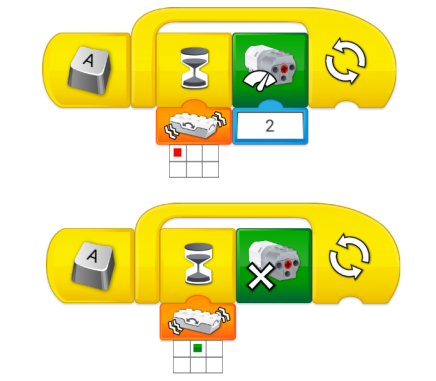
Программа для работы склада:
Склад программируется на отдельном планшете. Для этого к планшету подключается 2 блока управления, датчика наклона маркируются.
Требования к роботу:
Габариты робота не должны превышать размер зоны старта и дополнительных конструкций склада.
Робот 1 должен иметь в конструкции статичные приспособления для поворота датчика наклона 1 и 2 (включение/выключение кнопок). Роботы конструируются самостоятельно, без помощи карт сборки.
Робот 2 должен иметь в конструкции кузов, в который соберет груз, падающий с конвейера (кубики на 1).
Оценки выполнения задания роботами:
Критерий
Расшифровка
Количество баллов
Старт роботов
Роботы стартовали одновременно
0
Роботы стартовали не одновременно
1
Один робот не стартовал
2
Работа 2 робота
Робот вовремя (до начала работы конвейера) приехал под конвейерную ленту
0
Робот приехал под неработающую конвейерную ленту (так и не была включена)
1
Робот приехал под конвейерную ленту после ее запуска
2
Робот приехал под конвейерную ленту после ее выключения
3
БЛАНК 4 КАТЕГОРИЯ
Участник ___________________________________ номер ___________ИТОГОВЫЙ БАЛЛ__________
Критерий
Расшифровка
Количество баллов
(обвести в кружок цифру)
1
2
3
4
5
Старт роботов
Роботы стартовали одновременно
0
0
0
0
0
Роботы стартовали не одновременно
1
1
1
1
1
Один робот не стартовал
2
2
2
2
2
Работа 2 робота
Робот вовремя (до начала работы конвейера) приехал под конвейерную ленту
0
0
0
0
0
Робот приехал под неработающую конвейерную ленту (так и не была включена)
1
1
1
1
1
Робот приехал под конвейерную ленту после ее запуска
2
2
2
2
2
Робот приехал под конвейерную ленту после ее выключения
3
3
3
3
3
Время попытки
КАТЕГОРИЯ
Тема соревнований "РОБОТЫ ДЛЯ СКЛАДА"
"Роботы для склада" - это автономные механизмы, которые выполняют СОВМЕСТНУЮ работу на складе по отгрузке и перемещению грузов.
Участие: командное, 1 команда - 2 человека.
Оборудование:
На команду (2 человека) выдается 2 базовых набора конструктора WEDO 2.0 для выполнения задания, по условию задания нужно построить 2 конструкции с 1 мотором.
Основное задание:
Сконструировать 2 роботов для совместной работы на складе. После запуска программ роботы должны выполнить работу автономно (т.е. без помощи операторов-участников).
Задача 1-го робот выехать с места старта включить конвейерную ленту, на которой располагается груз, и выключить ее после того как груз будет загружен на 2 робота, приехать на финиш.
Задача 2-го робота выехать с места старта, остановиться под конвейерной лентой, загрузить груз и приехать на финиш. Роботы стартуют одновременно, т.е. со старта начинают двигаться одновременно.
Задание на поле выполняется на время, время засекается секундомером и плюсуется с итоговыми баллами.
Описание поля:
Поле имеетдополнительные конструкции, с помощью которых выполняется задание на складе. Они собираются по карте сборки "Склад".
Дополнительные конструкции склада:
Склад строится 1 на всех команды, для его строительства необходимы: 2 блока управления, 1 мотор, 2 датчика наклона. В конструкцию склада входит:
1 - датчик наклона 1 - кнопка "включения", подключается к 1 блоку управления
2 - датчик наклона 2 - кнопка "выключения", подключается ко 2 блоку управления
3 - мотор для вращения конвейерной ленты, подключается ко 2 блоку управления
Остальные элементы склада строятся из дополнительных кирпичиков
3
1
2
Описание поля:
Общий размер поля с заданием: 1800х800 мм
Синим обозначены зоны старта для 1 и 2 робота (1 робот стартует со СТАРТА 1, 2 робот со СТАРТА 2), роботы на старте ставится на границе старта и начала склада, каждый участник сам выставляет своего робота. Роботы должны стартовать ОДНОВРЕМЕННО. Для ориентира робота 1 на поле наносится красная линия, эта линия расположения датчиков наклона, одни должны располагаться строго над этой линией. Размер зоны старта составляет - 350 (ш) х 350 (д) мм.
"Оранжевый 1" - место расположение кнопки "Включение", расстояние от старта до кнопки 20 см. Рабочее положение датчика наклона - строго вниз. Робот 1 с помощью статичного приспособления должен изменить положение датчика наклона в любую сторону, это будет считаться "Включением".
"Оранжевым 2" обозначено место кнопки "Выключение". Рабочее положение датчика наклона - строго горизонтально. Робот 1 с помощью статичного приспособления должен изменить положение датчика наклона в любую сторону, это будет считаться "Выключением".
"Оранжевым 3" - расположение конвейерной ленты, по которой будет двигаться груз. Лента движется от блок управления.
От конвейерной ленты до ФИНИША 1 и СТАРТА 2 расстояние 50 см.
Макет поля:
Программа для работы склада:
Склад программируется на отдельном планшете. Для этого к планшету подключается 2 блока управления, датчика наклона маркируются.
Требования к роботу:
Габариты робота не должны превышать размер зоны старта и дополнительных конструкций склада.
Робот 1 должен иметь в конструкции статичные приспособления для поворота датчика наклона 1 и 2 (включение/выключение кнопок). Роботы конструируются самостоятельно, без помощи карт сборки.
Робот 2 должен иметь в конструкции кузов, в который соберет груз, падающий с конвейера (кубики на 1).
Оценки выполнения задания роботами:
Критерий
Расшифровка
Количество баллов
Старт роботов
Роботы стартовали одновременно
0
Роботы стартовали не одновременно
1
Один робот не стартовал
2
Включение конвейера роботом 1
Робот включил конвейер
0
Робот не включил конвейер
3
Поделиться с друзьями:
История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...



 "Оранжевый 1" - место расположение кнопки "Включение", расстояние от старта до кнопки 20 см. Рабочее положение датчика наклона - строго вниз. Робот 1 с помощью статичного приспособления должен изменить положение датчика наклона в любую сторону, это будет считаться "Включением".
"Оранжевый 1" - место расположение кнопки "Включение", расстояние от старта до кнопки 20 см. Рабочее положение датчика наклона - строго вниз. Робот 1 с помощью статичного приспособления должен изменить положение датчика наклона в любую сторону, это будет считаться "Включением".