Индуктивный датчик - это преобразователь параметрического типа, принцип действия которого основан на изменении индуктивности L или взаимоиндуктивности обмотки с сердечником, вследствие изменения магнитного сопротивления RМ магнитной цепи датчика, в которую входит сердечник.
Дифференциальная схема включения индуктивного измерительного преобразователя требует использования трансформатора со средней точкой (рис. 5.8). Оба сердечника идентичны по своим конструктивным и магнитным характеристикам. Расположенные на них обмотки w1 и w2 имеют также одинаковые параметры и включены последовательно-встречно. Сопротивление нагрузки RH включается между средней точкой трансформатора и средней точкой обмоток преобразователя.
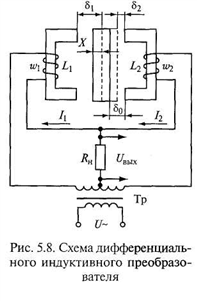
В такой схеме ток Iвых, протекающий по сопротивлению нагрузки, равен разности токов правой и левой половин схемы. В векторной форме это равенство примет следующий вид:
а выходное напряжение

При отсутствии входного сигнала зазоры δ1 и δ2 между якорем и ярмом одинаковы: δ1 = δ2 = δ0. Равны и индуктивности L1 и L2 обеих половин датчика, определяемые размерами зазоров. Следовательно, выходное напряжение преобразователя Uвых равно нулю (рис. 5.9, а).

При перемещении якоря на расстояние X зазоры δ1 и δ2 становятся неравными:

Изменение зазоров приводит к изменению индуктивностей: увеличение δ1 ведет к уменьшению L1 а уменьшение δ1 - к увеличению L2. Изменение индуктивностей плечей датчика приводит к дисбалансу токов I1 и I2, в результате чего через сопротивление нагрузки потечет ток Iн = Iвых, и появится выходное напряжение (рис. 5.9, б).
Если изменяется направление перемещения якоря, фаза выходного напряжения сдвигается на 180° относительно напряжения питания, являющегося опорным (рис. 5.9, в).
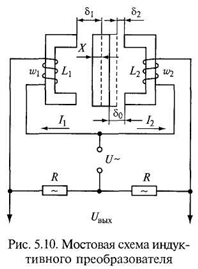
Принцип действия мостовой схемы индуктивного преобразователя (рис. 5.10) аналогичен принципу действия дифференциальной схемы. Выходное напряжение мостовой схемы

В исходном состоянии при δ1 = δ2 = δ0, L1 = L2 = Lo, Uвых = 0, так как l1 = l2. Перемещение якоря вправо на расстояние X приводит к изменению зазоров: δ1 = δ0 + X; δ2 = δ0 - X, а также индуктивностей плечей моста:

Считая, что активное сопротивление обмоток мало по сравнению с их индуктивным сопротивлением, можно записать комплексные выражения величин l1 и l2 в следующий алгебраической форме:

где j - мнимая единица.
Тогда разность токов

На основании выражения (5.8) можно записать: L2 – L1 = 2ΔL; L2 + L1 = 2L0; L2L1 = L02 - ΔL2 = ΔL2. При малых изменениях зазора 5 функция L = f(x) практически линейна, и для нее справедливо отношение ΔL = (L0/δ0)X; соответственно выражение (5.9) будет иметь вид

Умножив и разделив последнее выражение на (R – jwL0)2 и выделив действительную и мнимую части, получим модуль разности токов I1 и I2:

а выходное напряжение согласно формуле (5.7) запишем в виде

Так как все параметры за исключением X являются постоянными, то выражение (5.10) можно привести к виду
где K = 2UwL0R/[δ0(R2 + w2L02)] -коэффициент преобразования индуктивного датчика.
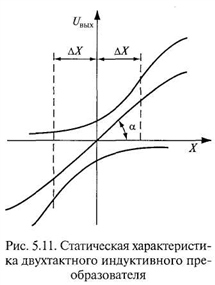
Таким образом, статическая характеристика двухтактного индуктивного измерительного преобразователя представляет собой функцию вида Uвых= KX1 что соответствует прямой, проходящей через начало координат под углом α = arctg K (рис. 5.11).
Как видно из рисунка, при изменении направления перемещения входной величины X фаза выходного сигнала изменяется на 180°. Кроме того, с увеличением входного сигнала наблюдается отклонение выходной характеристики от линейной, что объясняется уменьшением индуктивного сопротивления wLи приближением его значения к сопротивлению нагрузки. В связи с этим значение ΔX для реверсивных индуктивных датчиков не должно превышать (0,3...0,4)δ0. В этом случае выходную характеристику можно считать линейной.







