

Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Эмиссия газов от очистных сооружений канализации: В последние годы внимание мирового сообщества сосредоточено на экологических проблемах...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
Топ:
Марксистская теория происхождения государства: По мнению Маркса и Энгельса, в основе развития общества, происходящих в нем изменений лежит...
Теоретическая значимость работы: Описание теоретической значимости (ценности) результатов исследования должно присутствовать во введении...
Особенности труда и отдыха в условиях низких температур: К работам при низких температурах на открытом воздухе и в не отапливаемых помещениях допускаются лица не моложе 18 лет, прошедшие...
Интересное:
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Средства для ингаляционного наркоза: Наркоз наступает в результате вдыхания (ингаляции) средств, которое осуществляют или с помощью маски...
Финансовый рынок и его значение в управлении денежными потоками на современном этапе: любому предприятию для расширения производства и увеличения прибыли нужны...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
В Matlab в окне Command Window ввести значения параметров K1, Tu (см. рис. 5.4). После этого открыть блок NCD Outport, выбрать в меню Optimization/Parameteres, в появившемся окне (см. рис. 5.5) ввести оптимизируемые коэффициенты, их нижние и верхние пределы оптимизации. Запустить проект, нажав на панель инструментов на кнопку Start (см. рис. 5.6). Далее в Matlab в окне Command Window просмотреть значения параметров K1 и Tu (см. рис. 5.7).
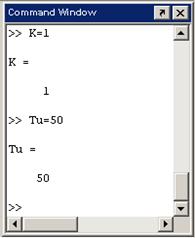
Рис. 5.4 Ввод параметров K 1, Tu
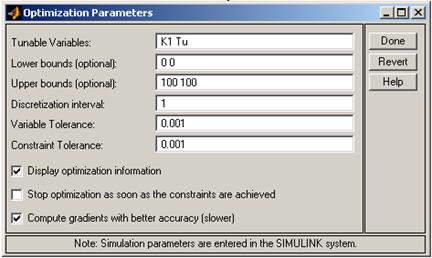
Рис. 5.5 Определение параметров оптимизации К1, Т u

Рис. 5.6 Результат работы блока NCD Outport

Рис. 5.7 Просмотр оптимизированных параметров К1 и Т u
Построить график переходного процесса выхода объекта управления при введенных оптимальных коэффициентах.
Используя Scope, просмотреть графики переходного процесса (см. рис. 5.8). Проанализировать полученные результаты (см. рис. 5.9).
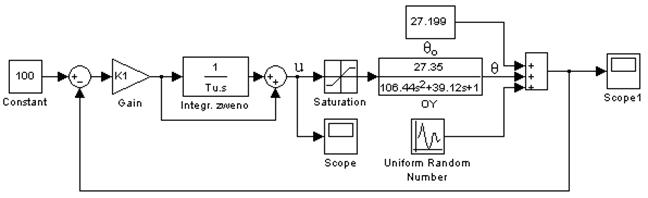
Рис. 5.8 Схема для просмотра графиков переходных процессов
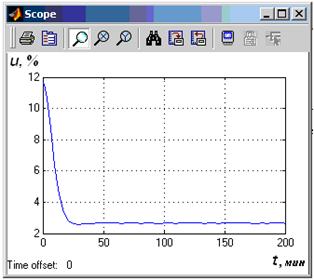
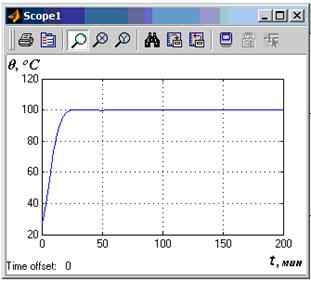
Рис. 5.9 Графики переходных процессов
5.3.4 Сделать выводы по проделанной работе.
5.4 Контрольные вопросы и задания
5.4.1 Оцените качество полученного переходного процесса.
5.4.2 Какой метод оптимизации был применен в работе?
5.4.3 Каким образом влияют настроечные коэффициенты ПИД регулятора на качество переходного процесса?
5.4.4 Для чего в схеме модели контура управления объектом (рис. 2) введен блок «saturation»?
Обязательные составляющие отчета
1. Схема оптимизации параметров ПИ регулятора.
2. Значения оптимальных параметров ПИ регулятора.
3. График переходного процесса и управляющего воздействия.
Лабораторная работа №6
Построение системы регулирования температуры
6.1 Цель работы: освоение методики построения типового контура управления с использованием контроллера.
Теоретическое введение
В АСУ ТП на нижних уровнях иерархии управления находятся подсистемы автоматического управления и регулирования технологическими агрегатами и отдельными параметрами. Функциональная структура типового контура автоматического регулирования приведена на рис. 6.1.

Рис. 6.1 Функциональная схема типового контура регулирования
В данной лабораторной работе рассматривается контур управления температурой в электрической нагревательной печи. Объектом управления является печь, выходная величина которой – температура – измеряется при помощи термопары или термосопротивления.
Для стабилизации значения температуры в STEP 7 при построении контура управления на базе ПИД, ПИ регуляторов рекомендуется использовать блок (TCONT_CP), который реализует функции указанных регуляторов.
Вызов блока регулятора
Схема, изображенная на рис. 6.2, показывает вызов управления в FBD. А в таблице 1 приведено описание некоторых параметров блока ПИД-регулирования (TCONT_CP).

Рис. 6. 2 Схема TCONT_CP
Таблица 1. Описание используемых в работе параметров блока TCONT_CP
| Параметр | Назначение | Тип | Описание |
| PV_IN | INPUT (Вход) | REAL | Вход переменной процесса (“Process Variable In”). Начальное значение может быть установлено на данном входе или может быть подключена внешняя переменная процесса в формате чисел с плавающей запятой. |
| SP_INT | INPUT (Вход)/ OUTPUT (Выход) | REAL | Внутреннее значение сигнала уставки (“Internal Setpoint”). Вход “Internal Setpoint” используется для задания уровня сигнала уставки. |
| MAN | INPUT (Вход)/ OUTPUT (Выход) | REAL | Управляющая переменная, введенная вручную (“Manual Value”). При автоматическом режиме корректируется до значения управляющей переменной. |
| MAN_ON | INPUT (Вход)/ OUTPUT (Выход) | BOOL | Переключатель на работу в ручном режиме (“Manual Operation On”). Если параметр “Manual Operation On” установлен, то управляющая переменная, введенная вручную (MAN), устанавливается в качестве значения управляющей переменной. 0 – автоматический режим; 1 – ручной режим. |
| LMN | OUTPUT (Выход) | REAL | Управляющая переменная (“Manipulated Variable”). Действующее значение управляющей переменной в формате числа с плавающей запятой подается на одноименный выход: Manipulated Variable. |
| QPULSE | OUTPUT (Выход) | BOOL | Выходной импульсный сигнал (“Output Pulse”). ШИМ-модулированное импульсное представление управляющей переменной на выходе: Output Pulse. |
Порядок конфигурирования блока, реализующего ПИ-закон регулирования:
1) Создать организационный блок OB35; открыть его и из справочника Overviews взять компонент FB58 TCONT_CP CONTROL по ветви Libraries / Standard Library / PID Control Blocks (см. рис. 6.3).

Рис. 6.3 Выбор блока, реализующего ПИ-закон регулирования,
из справочника Overviews
2) Необходимо выделить место в памяти контроллера для ПИ-регулятора. Для этого надо создать блок данных DB58.

Рис. 6.4 Окно параметров блока данных DB 58
3) После того как создали DB58, в OB35 в заголовке блока TCONT_CP выбрать “PID” (см. рис. 6.5).

Рис. 6.5 Привязка блока ПИ-регулирования (TCONT _ CP) к DB 58
4) Открыть блок DB58 и ввести значения требуемых параметров (рис. 6.6).
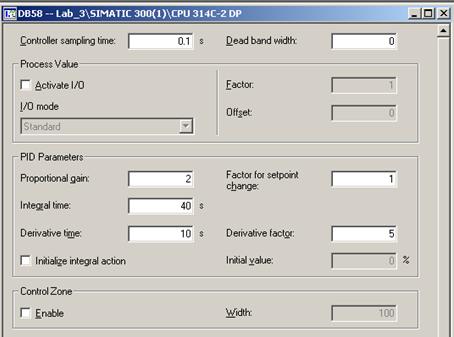

Рис. 6.6 Окно ввода значений параметров блока данных DB 58
Порядок выполнения работы
6.3.1 Создать новый проект и сконфигурировать контроллер в STEP7.
6.3.2 В левой части окна проекта раскрыть дерево до Вlocks. Создать организационный блок OB35. В появившемся окне Properties выбрать язык, на котором будем писать программу: LAD (контактно-релейные схемы).
6.3.3 В появившемся окне написать программу выполнения поставленной задачи (реализовать систему регулирования температуры) (см. рис. 6.7):
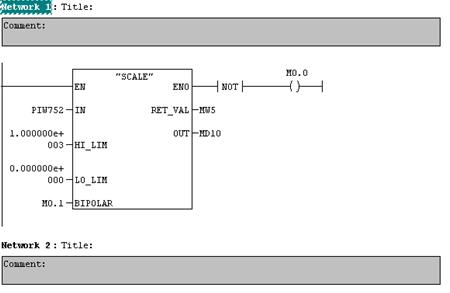

Рис. 6.7 Программа выполнения поставленной задачи
6.3.4 Сохранить изменения в OB35, выбрав в главном меню File/Save.
6.3.5 Открыть блок данных DB58, в который ввести значения коэффициента пропорциональности КП и время интегрирования ТИ (перевести в секунды), полученные в лабораторной работе №5. А также установить Period равным значению при реализации широтно-импульсной модуляции в лабораторной работе №3. Параметр Sampling time установить в 0,1с. Установить флаг Pulse Generator (см. рис. 6.8).
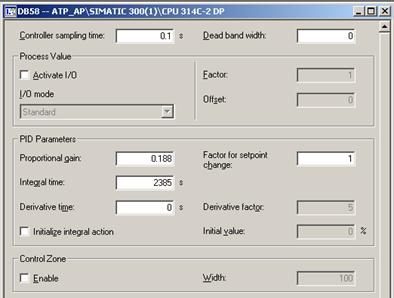
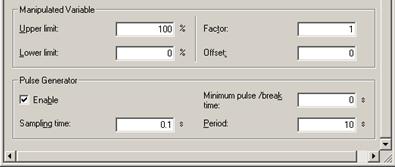
Рис. 6.8 Ввод значений КП и ТИ в блок DB 58
6.3.6 Реализовать визуальное отображение и архивирование сигналов температуры и управления (LMN) средствами ProTool.
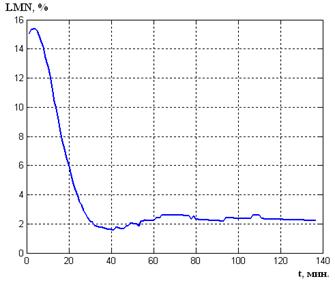
6.3.7 Построить график кривой переходного процесса (см. рис. 6.9). Это можно реализовать с помощью средств пакетов прикладных программ Microsoft Excel или Matlab.

а)
б)
Рис. 6.9 Графики переходных процессов, построенные по значениям:
а) тега VAR _1; б) тега VAR _2
6.3.8 Сделать выводы по проделанной работе.
6.4 Контрольные вопросы и задания
6.4.1 Что называется перерегулированием и как оно вычисляется?
6.4.2 Поясните роль алгоритмов в схеме, приведенной на рисунке 6.7.
6.4.3 Поясните принцип функционирования каналов ПИ регулятора.
6.4.4 Почему в Step 7 программу регулирования рекомендуется писать в OB35, а не в OB1?
|
|
|

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

Адаптации растений и животных к жизни в горах: Большое значение для жизни организмов в горах имеют степень расчленения, крутизна и экспозиционные различия склонов...

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций...

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...
© cyberpediasu.com 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

