
1 – обмотка управления;
2 – обмотка возбуждения
По закону управления 3-фазным мостовым инвертором, в такой системе необходимо иметь 3 ШИМ-пары с дополнительными выводами. Система нуждается в обеспечении «мертвого времени» для того, чтобы исключить одновременное состояние ВКЛ. Для двух транзисторов ШИМ-пары, которое может привести к короткому замыканию в шине постоянного тока. Микроконтроллер PIC16F72 в аппаратном исполнении не имеет таких свойств. Тем не менее это может быть осуществлено благодаря использованию регулятора выдержки времени общего назначения и шести вывода.
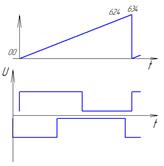
Рисунок 4.15 – Схема работы таймер
На схеме показана частота приблизительно 7,9 кГц. Таймер 1 ведет счет вверх из 00 в 634. В начале цикла (когда таймер1=00) верхние переключатели (ШИМ1, ШИМ3, ШИМ5) меняют состояние на ВКЛ. Соответствующие выводы ШИМ-ов меняют свое состояние на ВЫКЛ. Через пять циклов выполнения инструкции дополнительный ШИМ меняется на ВКЛ. Это дает «мертвое время» в 1 мс, в течение которого микроконтроллер работает на 20 МГц. Когда счет достигает 624, все выводы меняются на ВЫКЛ. Новый рабочий цикл начинается через10 циклов выполнения инструкции.
Результат вычисления сравнивается с предыдущим рабочим циклом ШИМ. Этот результат вычитается из FF и нагружается в регистр таймера 1. Когда в таймере 1 значение становится избыточным, срабатывает подпрограмма обработки прерывания, соответственный четный ШИМ меняется на ВЫКЛ, а соответственный нечетный ШИМ меняется на ВКЛ после пяти циклов выполнения инструкции. Это сделано для всех трех пар ШИМ-ов.
Микроконтроллер PIC16F72, выбранный для управления двигателем, позволяет построить эффективную и недорогую систему управления. Эффективное управление с помощью микроконтроллера осуществляется благодаря использованию 3-фазного инвертора. Микроконтроллер PIC16F72 был выбран для управления двигателем в силу присущих ему преимуществ, имеющих особое значение для разработанной в данном проекте системы автоматического управления уточным накопителем:
Выводы
1. В качестве примера рассмотрен регулятор скорости, используемый на нитенакопителях типа ИВЕ 9007 фирмы «ИРО». Объектом управления является трёхфазный асинхронный двигатель, управляемый напряжением на статоре, установленный на накопителе. В качестве аналога рассмотрен двигатель 4А900L4У2.
2. Проведенная параметрическая оптимизация системы с ПИД-регулятором с учетом заданных ограничений, определены оптимальные значения коэффициентов регулятора kp, ki, kd.
3. На основе имеющейся информации о транзисторном преобразователе, асинхронный двигатель, преобразователе вида D/2, который преобразовывает угол поворота вала двигателя в длину нити намотанной на барабан накопителя, датчике ширины намотки были построены передаточные функции. Была выведена передаточная функция для асинхронного двигателя. Также проведен расчет параметров объекта управления и его устойчивости для разомкнутой системы.
4. Были разработаны и изображены на рисунках 4.10 – 4.12 функциональная и структурная схемы управления уточным накопителем.
5. Была разработана принципиальная схема управления в состав которой входят необходимые источники питания, микроконтроллер PIC16F72, «силовой интегрированный модуль» IRAMS10UP60A и асинхронный двигатель.
6. Была разработана программа, которая предназначена для дискретных функций и представлена в виде блок схем.






