Проектируемый привод подачи выбранного станка-прототипа содержит асинхронный двигатель, поликлиновую ременную передачу. Привод продольного перемещения суппорта состоит из двигателя, зубчатых колес и шариковой пары винт — гайка. Высокомоментный двигатель постоянного тока с широким регулированием частоты вращения обеспечивает диапазон рабочих подач суппорта до 2000 мм/мин и скорость быстрых перемещений его 6000 мм/мин.
Расчет и обоснование основных технических характеристик проектируемого узла
Находим знаменатель геометрического ряда при помощи предельного значения подач и шагов нарезания резьб:

где z – число скоростей вращения;
Smax/Smin – предельное значение подач и шагов нарезаемых резьб.
В результате подставления данных в формулу получаем значение знаменателяя геометрического ряда:
 =1,41
=1,41
Определяем минимальные частоты вращения шпинделя для каждого из поддиапазонов регулирования:




















Описание кинематической схемы проектируемого узла
Приводы подач СБ 5582 в продольном и поперечных направлениях осуществляются соответсвтенно от двигателей постоянного тока М2 и М3 через одноступенчатые передачи и винт-гайки качения. На ходовых винтах 7,8 установлены измерительные фотоимпульсные датчики обратной связи.
Продольная подача каретки осуществляется от шагового электрогидравлического привода (шаговый электродвигатель – гидроусилитель) через передачу 50/50 и ходовой винт с P = 10 мм шариковой винтовой пары.
Поперечная подача суппорта с поворотной резцедержавкой осуществляется аналогично от шагового электрогидравлического привода через зубчатые колеса 40/40 и ходовой винт с P = 5 мм шариковой винтовой пары.
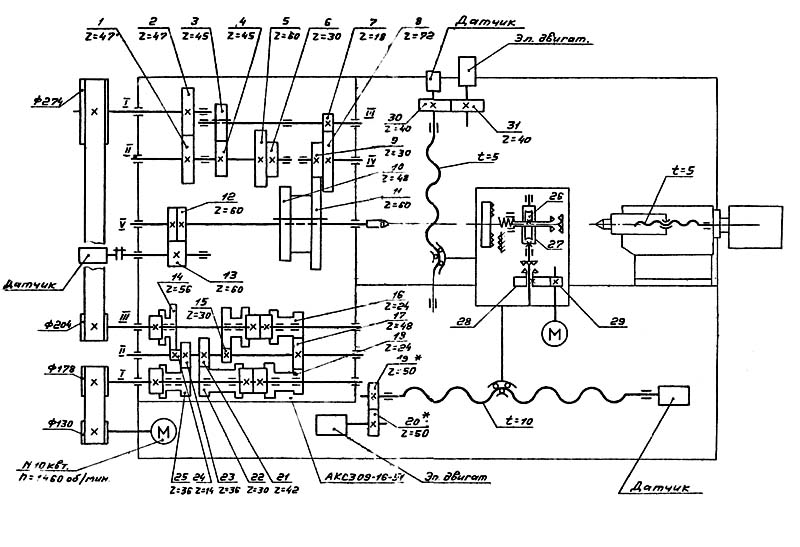
Рис. Кинематическая схема станка СБ5582 и передачи винт-гайка качения.
Расчет передач, устройств и механизмов привода станка
Предварительный расчет привода продольной подачи
Передача «винт—гайка качения» (ВГК) обладает свойствами, позволяющими применять ее как в приводах подач без отсчета перемещений (универсальных станков, силовых столов агрегатных станков), так и в приводах подач и позиционирования станков с ЧПУ. Механизмы ВГК также используют в приводах подач столов, суппортов, траверс почти всех станков.
Для передачи характерны высокий КПД (0,8...0,9), небольшое различие между силами трения движения и покоя, незначительное влияние частоты вращения винта на силу трения в механизме, полное отсутствие осевого зазора. Недостатками являются высокая стоимость, пониженное демпфирование, отсутствие самоторможения.
В соответствии с DIN 69 051, часть 1, шарико-винтовой привод определяется как винтовой приводной механизм с шариками, работающими в режиме качения. Он предназначен для преобразования вращательного движения в поступательное или наоборот.
Критерии выбора шарико-винтовых приводов.
Для расчета шарико-винтового привода существенны следующие исходные данные:
-требования к точности (отклонения хода);
- нагрузка;
-ресурс;
-предельная скорость вращения;
- продольная устойчивость;
- жесткость / люфт;
-коэффициент скорости вращения.
Чтобы получить конструктивно и экономически оптимальное решение, необходимо учитывать следующее:
- шаг является решающим фактором для допустимой нагрузки (определяется также максимальным диаметром шариков);
- при расчете необходимо принимать не крайние, а средние значения величины нагрузки и скорости вращения.
Выбор шарико-винтовой пары
Ресурс машины при длительности включения шарико-винтового привода 60% должен составлять 40 000 часов. При и вменяющихся режимах работы (переменные скорость вращения и нагрузка) ресурс рассчитывается на основе средних значений Fm и пт по формулам (1.1) и (1.2). Значения нагрузок для различных условий следующие:
холостой ход: F3 = 20 Н, q3 = 20%, n3 = 3 000 об / мин;
режим разгона: F4 = 3 770 Н, q4 = 10%, n4 = 3 000 об / мин.
Тяговая сила при движении на рабочем ходу: Q = 6 500 Н.
Начальная сила трения на одной грани То = 4...5 Н; тогда Qбх = 20 Н.
Тяговая сила при разгоне вычисляется по формуле (1.4).
Масса шпиндельной бабки т = 1500 кг.
Из формулы (1.5) находим ускорение.
Максимальная скорость быстрого хода, V = 30 ООО мм / мин.
Время изменения подачи от 0 до максимума, t - 0,2 с.

Qразг=4*5+1500+2,5=3770 Н
Среднюю скорость вращения nm расчитываем по формуле (1.2)

Среднюю нагрузку при переменных нагрузке и скорости вращения  рассчитываем по формуле (1.1):
рассчитываем по формуле (1.1):

Найдем требуемый ресурс L по зависимости:
L=24000*900*60=13*107 об
Рассчитаем допустимую динамическую нагрузку С по формуле (1.6)

По полученным данным подбираем передачу «винт-гайка качения» фирмы “Rexroth” SEM-E-S 32 x lOR * 3.5-4, статическая грузоподъемность Со =58,ЗкН; динамическая грузоподъемность Са/И =31,7 кН. Фланцевая одинарная гайка.
Определение вращающего момента на ходовом винте Вращающий момент на валу определяется по формуле:
Коэффициент полезного действия винтовой передачи принимаем ηВ=10,8, тогда



Определение частоты вращения ходового винта при быстрых перемещениях
Частоту вращения ходового винта на быстром ходу п6 х определяем по формуле

Скорость быстрого хода суппорта V= 30 000 мм / мин.
Предварительный выбор электродвигателя
При повторно-кратковременном режиме двигатель выбирают с учетом продолжительности включения (ПВ), т. е. по моменту с помощью формулы:

Табли ца 1.2— Конфигурация двигателя 1FT5074-1AF71
| Показатель
| Значение
|
| Статический момент М, Н • м
| 25,0
|
| Максимальный момент М, Н • м
| 34,0
|
| Момент инерции ротора (без тормоза) J, 1(Г* кг • м2
| 36,7
|
| Максимальная частота вращения, мин'1
| 3 000,0
|
| Мощность, кВт
| 5,7
|
Исходя из вышеприведенных расчетов, подбираем синхронный серводвигатель фирмы “Siemens” серии 1FT5074-1AF71. Основные параметры этого двигателя приведены в таблице 1.2.








