| № вар.
| Номер точки на графике и её координаты
|
|
|
|
|
|
|
|
|
|
| Х0
| Y0
| Х1
| Y1
| Х2
| Y2
| Х2
| Y2
| Х4
| Y4
| Х5
| Y5
| Х6
| Y6
|
| Х
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Программу (рис. 17) можно представить в виде конфигурационной таблицы. В конфигурационной таблице видны все настройки каждого алгоритма. В конфигурационную таблицу вставляют комментарии, пояснения. Программа представленная в виде таблицы более информативна, но менее наглядна. По таблице трудно анализировать алгоритм работы программы, прослеживать связи между алгоблоками.
Конфигурационная таблица программы регулятора с КУС
Редактор схем контроллера Ремиконт Р-130.
Имя программы: REGKUS1.rem
Дата создания отчета: 17/11/2012.
СИСТЕМНЫЕ ПАРАМЕТРЫ:
Системный номер контроллера: 2.
Модель контроллера: Регулирующая.
Комплектность УСО группы А: 8 ан. вх. и 2 ан. вых.(1).
Комплектность УСО группы Б: 8 д. вх. и 8 д. вых. (5).
Временной диапазон контроллера: Младший (Cек/Мин).
Время цикла: 0,4 сек.
АЛГОРИТМЫ И КОНФИГУРАЦИЯ:
Таблица 4
| Ал. б.
| Алгоритм
| Мод
| Вход
| Тип
| Значение
| Источник
|
| | | | N Имя
| | | Ал. б. / Выход
|
|
| ОКО (01)
|
|
|
|
|
|
|
|
|
| 1 Xздн
|
|
| 13/1 (Yздн)
|
|
|
|
| 2 Xвх
|
|
| 10/1 (Y1)
|
|
|
|
| 3 W0
|
|
|
|
|
|
|
| 4 W100
|
|
|
|
|
|
|
| 5 Xerr
|
|
| 14/2 (Yerr)
|
|
|
|
| 6 Xруч
|
|
| 15/1 (Y)
|
|
|
|
| 7 Xвр
|
|
| 15/1 (Y)
|
|
|
|
| 8 Z
|
|
| 8/1 (Y)
|
|
|
|
| 9 Nz
|
|
|
|
|
|
|
| 10 Nок
|
|
|
|
|
| ПОР (59)
|
|
|
|
|
|
|
|
|
| 1 X11
|
| инверсия
| 8/1 (Y)
|
|
|
|
| 2 X21
|
|
|
|
|
|
|
| 3 Хср.1=0.1
|
| 0.1
| Порог
|
|
|
|
| 4 DХ1=0
|
|
| Гистерезис
|
|
| ТРИ (76)
|
|
|
|
|
|
|
|
|
| 1 Cs1
|
|
| 8/2 (D)
|
|
|
|
| 2 Cr1
|
|
| 5/1 (D1)
|
|
| ПЕР (57)
|
|
|
|
|
|
|
|
|
| 1 X1 = 0
|
|
|
|
|
|
|
| 2 C1
|
|
| 9/1 (D1)
|
|
|
|
| 3 X2=10
|
|
|
|
|
|
|
| 4 C2
|
| инверсия
| 6/1 (D1)
|
|
|
|
| 5 X3= -10
|
| –10
|
|
|
|
|
| 6 C3
|
|
| 6/1 (D1)
|
|
| ИНТ (33)
| –
|
|
|
|
|
|
|
|
| 1 X
|
|
| 7/1 (Y)
|
|
|
|
| 2 T = 20
|
|
|
|
|
|
|
| 3 Снач
|
|
|
|
|
|
|
| 4 Хнач=0
|
|
|
|
|
|
|
| 5 Хпор=100
|
|
|
|
Продолжение таблицы 4
|
| ВДБ (10)
|
|
|
|
|
|
|
| ВАА (07)
|
|
|
|
|
|
|
|
|
| 1 Xc1
|
|
|
|
|
|
|
| 2 Km1
|
|
|
|
|
|
|
| 3 Xc2
|
|
|
|
|
|
|
| 4 Km2
|
|
|
|
|
| СУМ (42)
|
|
|
|
|
|
|
|
|
| 1 Xo
|
|
| 10/2(Y2)
|
|
|
|
| 2 X1
|
|
| 8/1(Y)
|
|
| КУС (47)
|
|
|
|
|
|
|
|
|
| 1 1101
|
|
| 11/1(Y)
|
|
|
|
| 2 X0 = 0
|
|
|
|
|
|
|
| 3 Y0 = 0
|
|
| Эти значения для каждого варианта свои
|
|
|
|
| 4 X1 = 10
|
|
|
|
|
|
| 5 Y1 = 40
|
|
|
|
|
|
| 6 X2 = 15
|
|
|
|
|
|
| 7 Y2 = 40
|
|
|
|
|
|
| 8 X3 = 25
|
|
|
|
|
|
| 9 Y3 = 55
|
|
|
|
|
|
| 10 X4 = 35
|
|
|
|
|
|
| 11 Y4 = 55
|
|
|
|
|
|
| 12 X5 = 60
|
|
|
|
|
|
| 13 Y5 = 70
|
|
|
|
|
|
| 14 X6 = 20
|
|
|
|
|
|
| 15 Y6 = 40
|
|
|
|
| ЗДН (24)
|
|
|
|
|
|
|
|
|
| 1 Ccб
|
|
|
|
|
|
|
| 2 Сдб
|
|
|
|
|
|
|
| 3 Vдб
|
| INF 9999
|
|
|
|
|
| 4 Xвн
|
|
| 12/1 (Y)
|
|
| РАН (20)
| –
|
|
|
|
|
|
|
|
| 1 X1
|
|
| 13/1 (Yздн)
|
|
|
|
| 2 X2
|
|
| 10/1 (Y1)
|
|
|
|
| 3 Kм
|
|
|
|
|
|
|
| 4 Tф
|
|
|
|
|
|
|
| 5 Xdlt
|
|
|
|
|
|
|
| 6 Kп = 1
|
|
|
|
|
|
|
| 7 Tи = 15
|
|
|
|
|
|
|
| 8 Кд = 0
|
|
|
|
|
|
|
| 9 Xmax
|
|
|
|
|
|
|
| 10 Xmin
|
|
|
|
|
| РУЧ (26)
| –
| 1 Сруч
|
|
|
|
|
|
|
| 2 X
|
|
| 14/1 (Y)
|
|
|
|
| 3 Xдст
|
|
|
|
|
| АВА (11)
|
| 1 X1
|
|
| 15/1 (Y)
|
|
|
|
| 2 Xc1
|
|
|
|
|
|
|
| 3 Km1
|
|
|
|
В заключение этого параграфа следует отметить, что регулятор с переменной структурой может быть и другим. В простом случае меняется закон регулирования ПИД-регулятора. Например, из ПИД-регулятора можем получить П-регулятор или ПИ-регулятор. То есть в процессе работы автоматически или оператором производится изменение закона регулирования. Изменение структуры управления может касаться более сложных алгоритмов управления. Например, вначале работает оптимальный регулятор по быстродействию, а при подходе к заданной точке (заданию) происходит автоматическое переключение на стабилизацию (на ПИ-регулятор). Такой же подход можно использовать и с экстремальной системой управления [120, 121]. После нахождения экстремума система поиска переключается на стабилизацию, то есть на удержание найденного экстремума[15]. Другой пример: имеем комбинированный регулятор, в котором регулятор по возмущению можно отключать или подключать. Обратите внимание на то, что все отключения, переключения, изменения режима работы регулятора должны осуществляться безударно.
Регулятор с переменной структурой
На рис. 18 приведена простейшая структура регулятора с переменной структурой. П – пропорциональный регулятор; И – интегральный регулятор; Д – дифференциальная составляющая регулятора; К – коммутатор или переключатель. Используя переключатель, можно сформировать любой закон регулирования из этих трёх.
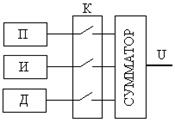
Рис. 18








