Введение
Комбинированный осциллятор - маятник, находящийся под воздействием нескольких сил различной физической природы, обеспечивающих возвращение отклоненного тела к одному и тому же положению устойчивого равновесия. Будем считать, что осциллятор совершает одномерные движения. Поэтому комбинацию математического маятника и пружинного маятника, показанную на рис. 1, рассматривать не будем, поскольку здесь меняются как угол отклонения, так и длина маятника. Это колебания с двумя степенями свободы.
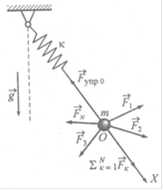
Рисунок.1 - Математический маятник на упругом подвесе: -
 - силы, действующие на маятник,
- силы, действующие на маятник,  - коэффициент жесткости пружины,
- коэффициент жесткости пружины,  - сила упругости пружины,
- сила упругости пружины,  - ускорение свободного падения.
- ускорение свободного падения.
Таким образом, целью данной работы является изучение одномерных колебаний комбинированного маятника.
В работе рассматриваются различные примеры комбинированных маятников, а также проводятся численные расчеты и построение фазовой траектории комбинированного маятника из лабораторной работы.
Цель работы: изучить движения комбинированного осциллятора и рассмотреть различные примеры комбинированных осцилляторов.
Задачи: получить соотношение для частоты колебаний комбинированного осциллятора и построить график движения осциллятора, фазовую траекторию и примерный спектр колебаний.
Примеры комбинированных маятников, расчет частоты колебаний
Список использованных источников
колебание комбинированный осциллятор
1. Савельев И.В. Курс общей физики т.2: учебное пособие/ И.В. Савельев. - Москва: Наука, 1988. - 496 с.
. Сивухин Д.В. Курс общей физики т.2 Электричество: учебное пособие/ Д.В Сивухин. - Москва: Наука, 1974. - 519 с.
. Ландау Л.Д. Механика./ Л.Д. Ландау, Е.М. Лившиц. - Москва: Наука, 1965. - 204 с.
. Гречихин Л.И. Колебания и волны: учебное пособие/ Л.И. Гречихин, Н.И. Козарь, Н.И. Павлова. - Минск: МВИЗРУ ПВО, 1973. - 129 с.
Введение
Комбинированный осциллятор - маятник, находящийся под воздействием нескольких сил различной физической природы, обеспечивающих возвращение отклоненного тела к одному и тому же положению устойчивого равновесия. Будем считать, что осциллятор совершает одномерные движения. Поэтому комбинацию математического маятника и пружинного маятника, показанную на рис. 1, рассматривать не будем, поскольку здесь меняются как угол отклонения, так и длина маятника. Это колебания с двумя степенями свободы.
Рисунок.1 - Математический маятник на упругом подвесе: -
- силы, действующие на маятник, - коэффициент жесткости пружины, - сила упругости пружины, - ускорение свободного падения.
Таким образом, целью данной работы является изучение одномерных колебаний комбинированного маятника.
В работе рассматриваются различные примеры комбинированных маятников, а также проводятся численные расчеты и построение фазовой траектории комбинированного маятника из лабораторной работы.
Цель работы: изучить движения комбинированного осциллятора и рассмотреть различные примеры комбинированных осцилляторов.
Задачи: получить соотношение для частоты колебаний комбинированного осциллятора и построить график движения осциллятора, фазовую траекторию и примерный спектр колебаний.
Примеры комбинированных маятников, расчет частоты колебаний
Маятник под воздействием силы тяжести и силы электростатического взаимодействия
Рассмотрим следующую задачу. Положительный заряд q сосредоточен на материальной точке массой m, которая подвешена в вакууме на невесомой нерастяжимой непроводящей нити длины l на высоте h над проводником (электропроводность которого бесконечна), занимающим нижнее полупространство. Граница раздела вакуума и металла - плоскость. Материальную точку отклоняют на малый угол от положения устойчивого равновесия. Найти собственную частоту колебаний такого комбинированного осциллятора.
Принять AB = BC = h; AD = Δh; l = ç  ç- длина нити; - радиус-вектор, проведенный из точки О в точку Р.
ç- длина нити; - радиус-вектор, проведенный из точки О в точку Р.
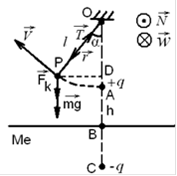
Рисунок 2 - Заряженная материальная точка, колеблющаяся над проводящим полупространством: -  - сила тяжести,
- сила тяжести,  - сила Кулона,
- сила Кулона,  - скорость маятника,
- скорость маятника,  - сила натяжения нити,
- сила натяжения нити,  - момент сил, действующих на маятник,
- момент сил, действующих на маятник,  - угловая скорость маятника, Ме - металлическая пластина, С - точка, в которой находится заряд-изображение, О - точка подвеса маятника, А - положение равновесия маятника, D - проекция положения маятника на вертикальную ось, α - угол отклонения от положения устойчивого равновесия, которое совпадает с прямой ОС.
- угловая скорость маятника, Ме - металлическая пластина, С - точка, в которой находится заряд-изображение, О - точка подвеса маятника, А - положение равновесия маятника, D - проекция положения маятника на вертикальную ось, α - угол отклонения от положения устойчивого равновесия, которое совпадает с прямой ОС.
На точку действуют сила тяжести, сила натяжения нити и сила электростатического (кулоновского) взаимодействия (рис. 2).
Рассмотрим подробнее силу кулоновского взаимодействия Fk.
Заряд +q перераспределяет свободные электроны проводника. В результате на поверхности раздела появляется отрицательный заряд по величине равный заряду q. Между исходным зарядом и наведенными зарядами возникает электростатическое взаимодействие. При колебаниях поверхностные заряды будут перемещаться, возникнут токи, что приведет к выделению джоулева тепла и магнитному взаимодействию. Однако, в хорошем металлическом проводнике (с бесконечной электропроводностью) при малых скоростях движения зарядов этими явлениями можно пренебречь.
Величину и направление кулоновской силы можно найти из сравнения картины силовых линий электрического диполя и картины силовых линий заряда, подвешенного над идеальным проводником. Силовые линии входят в проводник под прямым углом и их густота тем больше, чем ближе точка на поверхности проводника к точке B, лежащей на оси симметрии картины. Таким образом, картина силовых линий для рассматриваемого случая аналогична картине силовых линий диполя с расстоянием между положительным и отрицательным точечными зарядами равным 2h. Тогда Fk =  для оси симметрии. Это поле неоднородно, но для малых колебаний момент кулоновской силы, как и момент силы тяжести можно считать пропорциональным углу α.
для оси симметрии. Это поле неоднородно, но для малых колебаний момент кулоновской силы, как и момент силы тяжести можно считать пропорциональным углу α.
При отклонении нити на угол α материальная точка поднимается на высоту Δh = l(1 - cos α). Это приводит к изменению величины силы Fk:
Fk =  .
.
где  - постоянная кулоновского взаимодействия
- постоянная кулоновского взаимодействия  ,
,  - высота маятника над плоскостью
- высота маятника над плоскостью  .
.
Однако, при малых колебаниях, когда с достаточной точностью выполняется равенство
 , при
, при  , где
, где  :
:
 << 1 т.е.
<< 1 т.е.  << 1,
<< 1,
так как при малых 
 .
.
силу кулоновского взаимодействия заданного заряда и наведенных поверхностных зарядов можно считать неизменной.
Момент инерции маятника (относительно оси вращения О параллельной поверхности идеального проводника) 
J0 = ml2,
где l - длина нити ,  - масса маятника
- масса маятника  ,
,  - момент инерции маятника
- момент инерции маятника  .
.
Момент сил, действующих на материальную точку
N = (mg + Fk)lsinα. (1)
где PD = l sinα - плечо действующих сил ,  - момент сил
- момент сил  . Сам вектор
. Сам вектор  направлен перпендикулярно плоскости чертежа, а знак проекции определяется углом
направлен перпендикулярно плоскости чертежа, а знак проекции определяется углом  .
.
Связь между векторами скорости, угловой скорости и вектором  направленным от центра вращения по радиусу к материальной точке задается соотношением:
направленным от центра вращения по радиусу к материальной точке задается соотношением:
 = [
= [  ,
,  ],
],
где  - вектор скорости тела
- вектор скорости тела  ,
,  - угловая скорость тела
- угловая скорость тела  ,
,  - вектор, задающий положение тела, .
- вектор, задающий положение тела, .
Если скорость материальной точки направлена влево, то угловая скорость  и момент импульса
и момент импульса  = J0
= J0  направлены против момента сил
направлены против момента сил  . Поэтому основное уравнение динамики вращательного движения (уравнение моментов) запишется в виде
. Поэтому основное уравнение динамики вращательного движения (уравнение моментов) запишется в виде
J0α" = - (mg + Fk) lsinα, (2)
где 
 угловое ускорение
угловое ускорение  .
.
Тогда из (2) с учетом малости колебаний (sin α ≈α) получаем
α" +  lα = 0.
lα = 0.
В соответствии со стандартными обозначениями ω02 =  , где ω0 собственная частота
, где ω0 собственная частота  . Если бы заряда на материальной точке не было, то ω012 = mg/J0. Если бы можно было «отключить» силу тяжести, то ω022 = Fk/J0. Поэтому мы можем записать ω02 = ω012 + ω022. Если бы возвращающий момент обеспечивали n сил различной физической природы, то
. Если бы заряда на материальной точке не было, то ω012 = mg/J0. Если бы можно было «отключить» силу тяжести, то ω022 = Fk/J0. Поэтому мы можем записать ω02 = ω012 + ω022. Если бы возвращающий момент обеспечивали n сил различной физической природы, то
 . (3)
. (3)
где  - собственная частота колебаний маятника, движущегося только под действием силы
- собственная частота колебаний маятника, движущегося только под действием силы  .
.
Разумеется, это соотношение верно только для малых колебаний.
Рассмотрим еще несколько примеров, подтверждающих справедливость (3).








