

Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
Семя – орган полового размножения и расселения растений: наружи у семян имеется плотный покров – кожура...
История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
Топ:
Техника безопасности при работе на пароконвектомате: К обслуживанию пароконвектомата допускаются лица, прошедшие технический минимум по эксплуатации оборудования...
Методика измерений сопротивления растеканию тока анодного заземления: Анодный заземлитель (анод) – проводник, погруженный в электролитическую среду (грунт, раствор электролита) и подключенный к положительному...
Интересное:
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Наиболее распространенные виды рака: Раковая опухоль — это самостоятельное новообразование, которое может возникнуть и от повышенного давления...
Мероприятия для защиты от морозного пучения грунтов: Инженерная защита от морозного (криогенного) пучения грунтов необходима для легких малоэтажных зданий и других сооружений...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
Рассматривая функциональную схему устройства (рис. 11), можно сделать вывод о количестве необходимых компонентов для реализации цифровой САУ.
Представим список необходимых компонентов:
1) Плата Freeduino;
2) Силовой модуль;
3) датчики (3 типа);
5) ЖКИ - дисплей;
6) Радио модуль.
7.1 Плата.
Для проектируемой ЦСАУ рационально использовать плату Freeduino Through-Hole на базе микропроцессора ATmega168 т.к. она подходит к нашему т.з., простата в использовании, не большая цена.
Технические характеристики:
Микроконтроллер: ATmega168
Цифровые порты ввода/вывода: 14 портов (из них 6 с ШИМ-сигналом)
Аналоговые порты ввода: 6 портов
ППЗУ 16 K из них 2 К используются загрузчиком
ОЗУ (SRAM): 1 Кбайт
ПЗУ (EEPROM): 512 байт
Тактовая частота: 16 МГц
Интерфейс с ПК: USB
Питание от USB, либо от внешнего источника, выбор с помощью перемычки

Рис. 26 Freeduino Through-Hole.
Рис. 27 Обозначение элементов
Резистор 10 кОм R1
Резистор 1 кОм R7, R8, R9, R10, R11, R12
Неполярный конденсатор 100 нФ C1, C4, C5, C8, C9, C10, C12, CRS
Неполярный конденсатор 24 пФ C2, C3
Полярный конденсатор 47 мкФ C6, C7
Диод D1
Предохранитель F1
Светодиод красный Pin13, RX
Светодиод желтый TX
Светодиод зеленый PWR
Кварцевый резонатор Q1
Кнопка RESET
Вилка штыревая 3x1 ICSP
Вилка штыревая 3x1 SV1
Гнездо 6x1 JP1, J2
Гнездо 8x1 J1, J3
Гнездо USB X2
Гнездо питания DC1
Микроконтроллер ATmega168
Панель для микроконтроллера ATMEGA168
Микросхема FT232RL IC1 (уже смонтирована)
Стабилизатор 7805D2T IC2 (уже смонтирован)
Перемычка (джампер) Для выбора источника питания на SV1
Разъем питания Для подключения внешнего питания
Силовой модуль.
Будем использовать Motor drive – силовой модуль управления двигателями.
Технические характеристики
· напряжение питания на приводы: +4.5...+ 12 В;
· напряжение сигналов управления: 5 В;
· рабочее напряжение: 4.5-12 В;
· количество силовых каналов: 4;
· выходной ток: до 4А;
· возможность реверса каждого двигателя;
· возможность независимого управления каждым каналом;
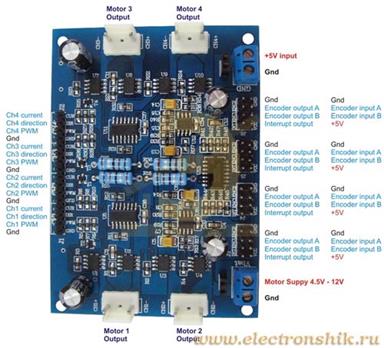
Рис. 28 силовой модуль Motor drive.
Датчик наклона
Будем использовать датчик наклона D6B-2

Рис.29 Датчик наклона D6B-2
Характеристики датчика наклона:
Диапазон величины угла срабатывания 45...75°
Диапазон величины угла сброса 50...20°
Напряжение питания 4...6 В
Потребляемый ток 10 мкА
Выходной сигнал:
высокий уровень (горизонтальное положение) Uпит 5 В
низкий уровень (наклонное положение) 0,5 В
Выходной ток ± 1 мА
Диапазон рабочих температур: -20...60 °С
Диапазон влажности среды: 10...85% отн. влажн.
Датчик тока.
Используем датчик тока ACS714 Sensor Carrier -30 to +30A

Рис.30 Датчик тока ACS714 Sensor Carrier -30 to +30A
Характеристики датчика наклона:
Размер: 20х17мм
Кратковременная перегрузка до 5 х
Выходной сигнал: аналоговый, 66 мВ/А
Сопротивление проводников платы: 1,2 Ом
Диапазон рабочих температур: -30...+50°
Энкодер.
Будем использовать инкрементный энкодер E30S4-3000-6-L-5
компании - AUTONICS (рис. 31).

Рис.31 Инкрементный энкодер E30S4-3000-6-L-5.
Характеристики энкодера:
Бренд - AUTONICS
VDC, В 6
Диаметр оси: 4 мм
Рабочая температура: -30…+70 °С
Степень защиты: IP50
Кабель: 2 м диам.
Масса: 80 гр
|
|
|

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...

Особенности сооружения опор в сложных условиях: Сооружение ВЛ в районах с суровыми климатическими и тяжелыми геологическими условиями...

Наброски и зарисовки растений, плодов, цветов: Освоить конструктивное построение структуры дерева через зарисовки отдельных деревьев, группы деревьев...

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
© cyberpediasu.com 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

