Замкнутые системы управления ЭП
1. Система управляемый преобразователь-двигатель с суммирующим усилителем.
Широкое применение в электроприводах постоянного тока получили статические и
астатические системы непрерывного действия стабилизации скорости двигателя постоянного тока при изменении нагрузки на его валу, обеспечивающие регулирование скорости и ее стабилизацию с высокой точностью в статических и динамических режимах.
Функциональная схема подобной системы приведена на рисунке 1.
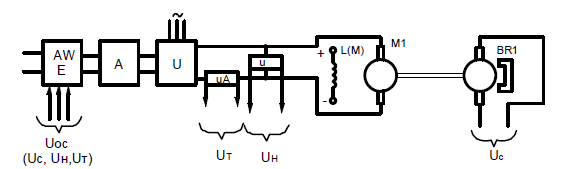
Рисунок 1
Схема содержит двигатель постоянного тока М, преобразователь U, промежуточный усилитель А, измерительный элемент АW (сумматор) и обратные связи. В качестве преобразователей в таких системах электропривода используются генераторы постоянного тока, электромашинные, магнитные и полупроводниковые (транзисторные и тиристорные) управляемые выпрямители.
В качестве промежуточных усилителей в электроприводах используются электромашинные, магнитные, транзисторные и интегральные усилители.
В системах электропривода применяются три основные жёсткие обратные связи: по скорости, напряжению и току двигателя.
Поддержание скорости вращения двигателем постоянного тока с обратной связью по напряжению
Первым узлом является узел с двигателем, управляемым при помощи преобразователя U с приблизительно постоянным выходным напряжением, которое питает якорь двигателя, имеющего постоянный магнитный поток.
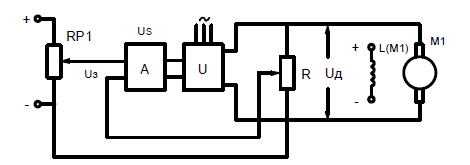
Рисунок 2 – Структурная схема системы «П-Д» с обратной связью по напряжению якоря
В зависимости от значений: коэффициента передачи ОС по напряжению (Кн), коэффициента усиления преобразователя U по напряжению (Кп), преобразователь будет поддерживать напряжение двигателя с большей или меньшей точностью.
Выходной переменной является скорость двигателя, которая даже при постоянном напряжении Uд изменяется с изменениями нагрузок на валу за счет падения напряжения на сопротивлении якоря двигателя Rд.
Уравнение скоростной характеристики двигателя:  Первое слагаемое в выражении - скорость идеального холостого хода ω0, зависит от коэффициента усиления замкнутой системы:
Первое слагаемое в выражении - скорость идеального холостого хода ω0, зависит от коэффициента усиления замкнутой системы:

Для получения одной и той же скорости идеального холостого хода в замкнутой системе необходимо большее значение задающего напряжения.
Типовой узел по току в СУЭП
Необходимость узла с положительной обратной связью по току возникла в связи с компенсацией возмущений в виде тока нагрузки, которое является основной причиной возникновения в узле с обратной связью по напряжению.
Функциональная схема такого узла приведена на рисунке 3.
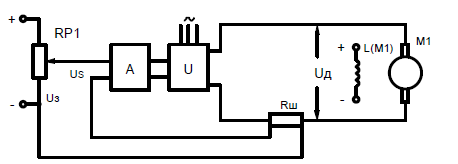
Рисунок 3- Функциональная схема «П-Д» с ОС по току
Суммарный сигнал на входе усилителя А:

где: Uз - напряжение задания;
Кт - коэффициент обратной связи по току;
Rш - сопротивление датчика тока (шунта).
Если растет нагрузка на валу двигателя, тогда в статических условиях растет и его ток, а следовательно, и сигнал на входе преобразователя, который заставит преобразователь увеличить напряжение на двигателе и тем самым более или менее точно скомпенсировать ошибку в скорости Δω, возникающую из-за падения напряжения на сопротивлении R, являющимся суммарным сопротивлением якоря и выходной цепи преобразователя. Иногда в качестве сопротивления шунта Rш используются сопротивления дополнительных полюсов, стабилизирующей и компенсационной обмоток двигателя.
Замкнутые системы управления ЭП
1. Система управляемый преобразователь-двигатель с суммирующим усилителем.
Широкое применение в электроприводах постоянного тока получили статические и
астатические системы непрерывного действия стабилизации скорости двигателя постоянного тока при изменении нагрузки на его валу, обеспечивающие регулирование скорости и ее стабилизацию с высокой точностью в статических и динамических режимах.
Функциональная схема подобной системы приведена на рисунке 1.
Рисунок 1
Схема содержит двигатель постоянного тока М, преобразователь U, промежуточный усилитель А, измерительный элемент АW (сумматор) и обратные связи. В качестве преобразователей в таких системах электропривода используются генераторы постоянного тока, электромашинные, магнитные и полупроводниковые (транзисторные и тиристорные) управляемые выпрямители.
В качестве промежуточных усилителей в электроприводах используются электромашинные, магнитные, транзисторные и интегральные усилители.
В системах электропривода применяются три основные жёсткие обратные связи: по скорости, напряжению и току двигателя.








