 Мгновенным центром скоростей (МЦС) плоской фигуры называется точка P, скорость которой в данный момент
Мгновенным центром скоростей (МЦС) плоской фигуры называется точка P, скорость которой в данный момент
времени равна нулю:
vP 0. МЦС может быть конкретной
точкой плоской фигуры или может располагаться вне плоской фигуры. В последнем случае его следует понимать как точку подвижной плоскости, жестко скрепленной с плоской фигурой. При движении плоской фигуры положение МЦС может изменяться как относительно самой фигуры, так и относительно неподвижной системы отсчета.
Использование МЦС упрощает процедуру определения скоростей точек плоской фигуры. Пусть в данный момент времени известно положение МЦС (точка P) и известна угловая скорость плоской фигуры (рис. 11).

Рис 11. Определение скоростей точек B и C
с использованием мгновенного центра скоростей P.
 Возьмем точку P для этого момента времени в качестве
Возьмем точку P для этого момента времени в качестве

 полюса, скорость которого
полюса, скорость которого
vP 0. Тогда согласно формуле
(2.15) скорость какой-либо точки B
vB vP
+ vBP vBP.
Направление скорости v B
перпендикулярно отрезку PB и ее
модуль
vB vBA PB. Аналогичный результат получается
 для другой точки C:
для другой точки C:

 vC vCP;
vC vCP;
vC vCA PC;
(vC PC).
Таким образом, скорости точек плоской фигуры пропорциональны их расстояниям до МЦС и определяются в данный момент времени так, как если бы движение фигуры было вращением вокруг МЦС.


|
Методы нахождения положения МЦС
|
|
1). Известен вектор скорости vAкакой-либо точки A плоской фигуры и ее угловая скорость
0.
|

|
| МЦС (точка P) находится на перпендикуляре к вектору vA, проведенном через точку A. Расстояние AP = vA/и откла- дывается в сторону, которую указывает вектор vAпосле поворота на угол /2 в направлении дуговой стрелки . При этом получается, что скорость
vP vAvPA vAvA0; (vPA PA vA).
|
 2). Известны не параллельные друг другу скорости vAи vBдвух точек плоской фигуры.
2). Известны не параллельные друг другу скорости vAи vBдвух точек плоской фигуры.
|
|
| МЦС (точка P) находится в точке пересечения перпен- дикуляров, проведенных через точки A и B к скоростям этих точек. Угловая скорость плоской фигуры
vA/ PA vB/ PB.
Отметим, что для нахождения только положения МЦС достаточно знать лишь направления скоростей двух точек.
|
|
Методы нахождения положения МЦС
|
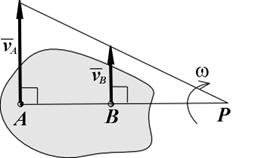
| 3). Известны параллельные друг другу скорости vAи vBточек A и B плоской фигуры, перпендикулярные отрезку AB, направленные в одну сторону и не равные по модулю (vA vB).
| 
|
| МЦС (точка P) находится в точке пересечения продолжения отрезка AB и прямой, проведенной через концы векторов vAи vB. При заданной длине отрезка AB расстояния от МЦС до точек A и B определяются из пропорции: vAvB= PA PB. Угловая скорость фигуры
vA/ PA vB/ PB.
Случай равенства vA vB см. п. 6 на с. 34.
|
| 4). Известны параллельные друг другу скорости vAи vBточек A и B плоской фигуры, перпендикулярные отрезку AB, направленные в разные сто- роны.
|

|
| МЦС (точка P) находится в точке пересечения отрезка AB и прямой, проведенной через концы векторов vAи vB. При заданной длине отрезка AB расстояния от МЦС до точек A и B определяются из пропорции: vAvB= PA PB. Угловая скорость фигуры vA / PA vB / PB.
|
|
Методы нахождения положения МЦС
|
|
5). Плоская фигура катится без скольжения по неподвиж- ной кривой.
|

|
| МЦС (точка P) находится в точке соприкосновения фигуры с кривой, так как скорости точек фигуры и неподвижной кривой, находящиеся в соприкосновении, равны между собой и, следовательно, равны нулю. Если известна скорость какой- либо точки A фигуры, то угловая скорость vA/ PA.
|
| 6). Известно, что скорости vAи vBдвух точек плоской фигуры параллельны друг другу и не перпендикулярны отрезку AB.
| 
|
| МЦС в данный момент времени не существует или, другими словами, находится в бесконечности. Угловая скорость плоской фигуры в данный момент равна нулю. Движение фигуры называется мгновенно-поступательным. Скорости всех точек фигуры равны (vA vB).
Аналогичный результат получается в случае равенства vA vB
(см. п. 4 на с. 33).
|
52,53,54.








