В практических схемах используется два метода формирования корреляционного интеграла
 (4.4.1)
(4.4.1)
принимаемого колебания u (t) с образцом сигнала s (t), который может поступить на вход приемной системы, - это метод корреляции и метод оптимальной фильтрации. Здесь и далее T - интервал, длительностью T, вне которого s (t)=0, например, tÎ (0, T), tÎ (-0,5 T;0,5 T) и т.д.
4. 4. 1. Метод корреляции (рис.4.4) сводится к прямому схемному моделированию корреляционного интеграла (1). В схему входит опорный генератор (ОГ), который вырабатывает колебание s (t), совпадающее по форме с сигналом, фигурирующим в корреляционном интеграле (1), перемножитель ( ), производящий операцию умножения принимаемого колебания u (t) на опорный сигнал s (t), и интегратор, осуществляющий интегрирование подводимых к нему колебаний u (t) s (t). В результате на выходе схемы формируется корреляционный интеграл (1). Схема очень проста в идейном отношении. Некоторые практические трудности представляет необходимость формировать в ОГ колебание, совпадающее (с точностью до произвольного коэффициента K) по форме и по временному положению с ожидаемым на входе сигналом s (t).
), производящий операцию умножения принимаемого колебания u (t) на опорный сигнал s (t), и интегратор, осуществляющий интегрирование подводимых к нему колебаний u (t) s (t). В результате на выходе схемы формируется корреляционный интеграл (1). Схема очень проста в идейном отношении. Некоторые практические трудности представляет необходимость формировать в ОГ колебание, совпадающее (с точностью до произвольного коэффициента K) по форме и по временному положению с ожидаемым на входе сигналом s (t).
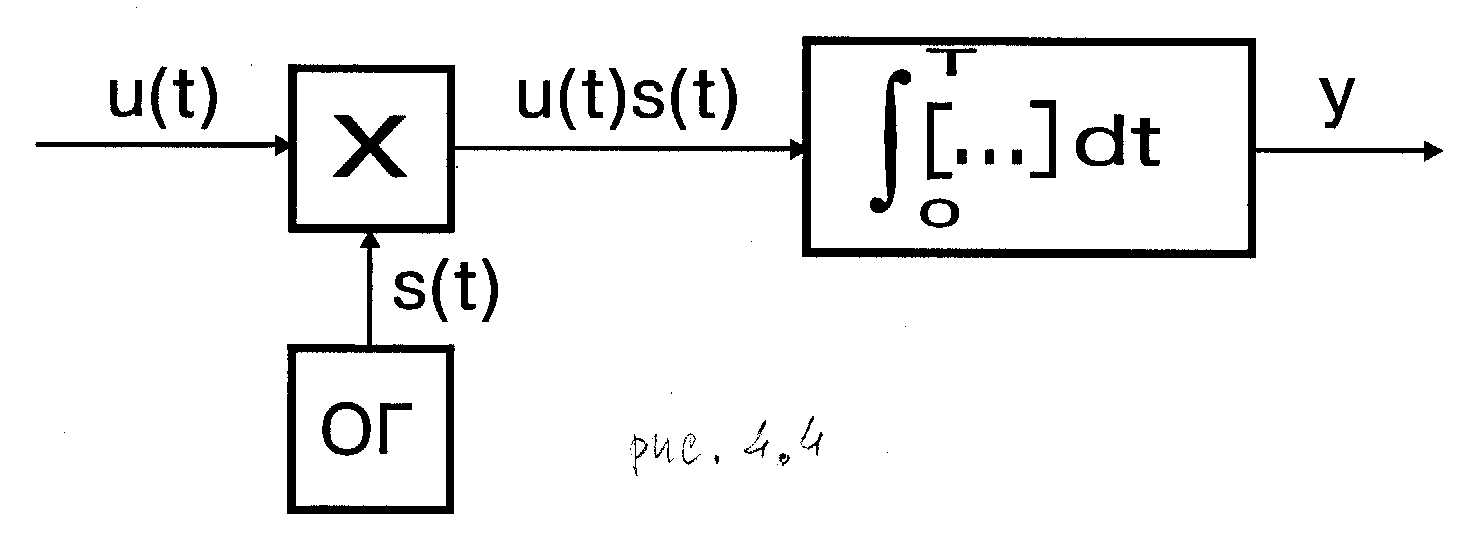
Рис. 4.4
4. 4. 2. Метод оптимальной фильтрации основан на формировании корреляционного интеграла при помощи оптимального фильтра (ОФ), представляющего собой ЛИВ-систему (рис.4.5) с соответствующим образом подобранной импульсной характеристикой h 0(t). Поясним выбор импульсной характеристики h 0(t) оптимального фильтра. При подаче на вход произвольной ЛИВ-системы с импульсной характеристикой h (t) колебания u (t) выходной эффект (выход) системы  имеет вид
имеет вид
 . (4.4.2)
. (4.4.2)
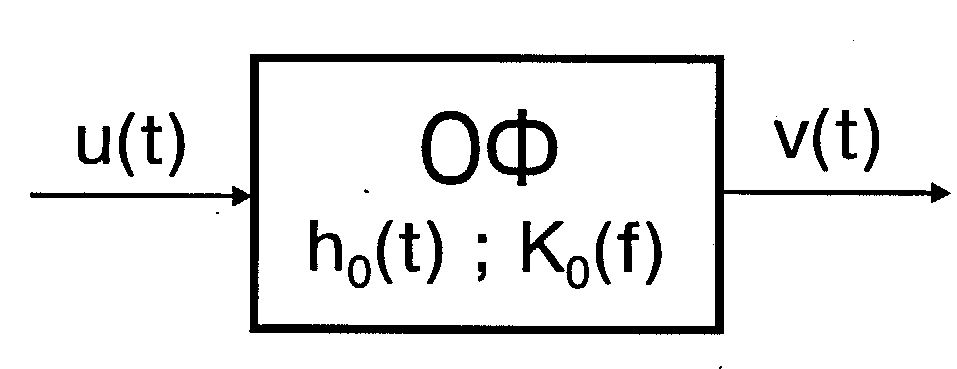
Рис. 4.5
Мы стремимся к тому, чтобы выход  совпал с корреляционным интегралом Y. Так как корреляционный интеграл (1)-число, а выход (2)-функция времени, то совпадение возможно только в некоторый фиксированный момент времени
совпал с корреляционным интегралом Y. Так как корреляционный интеграл (1)-число, а выход (2)-функция времени, то совпадение возможно только в некоторый фиксированный момент времени  . Уравнение, определяющее импульсную характеристику ОФ
. Уравнение, определяющее импульсную характеристику ОФ  (t), можно записать так
(t), можно записать так
 , (4.4.3)
, (4.4.3)
откуда следует, что  , или, обозначая
, или, обозначая  , окончательно получаем
, окончательно получаем
 . (4.4.4)
. (4.4.4)
Различие в пределах интегрирования в первом и во втором интегралах (3) значения не имеет: функция  вне интервала наблюдения T тождественно равна нулю. Следовательно, импульсная характеристика ОФ согласуется с видом сигнала s (t), для которого формируется корреляционный интеграл. Поэтому ОФ называется также согласованным фильтром (СФ). В выражении (4) для
вне интервала наблюдения T тождественно равна нулю. Следовательно, импульсная характеристика ОФ согласуется с видом сигнала s (t), для которого формируется корреляционный интеграл. Поэтому ОФ называется также согласованным фильтром (СФ). В выражении (4) для  может быть введен произвольный коэффициент K, характеризующий усиление. В теоретических рассмотрениях обычно принимают K =1.
может быть введен произвольный коэффициент K, характеризующий усиление. В теоретических рассмотрениях обычно принимают K =1.
Обсудим несколько подробнее результат (4). В частности, уточним значение  . Положим сигнал s (t), входящий в корреляционный интеграл (1), имеет вид, изображенный на рис.4.6.
. Положим сигнал s (t), входящий в корреляционный интеграл (1), имеет вид, изображенный на рис.4.6.
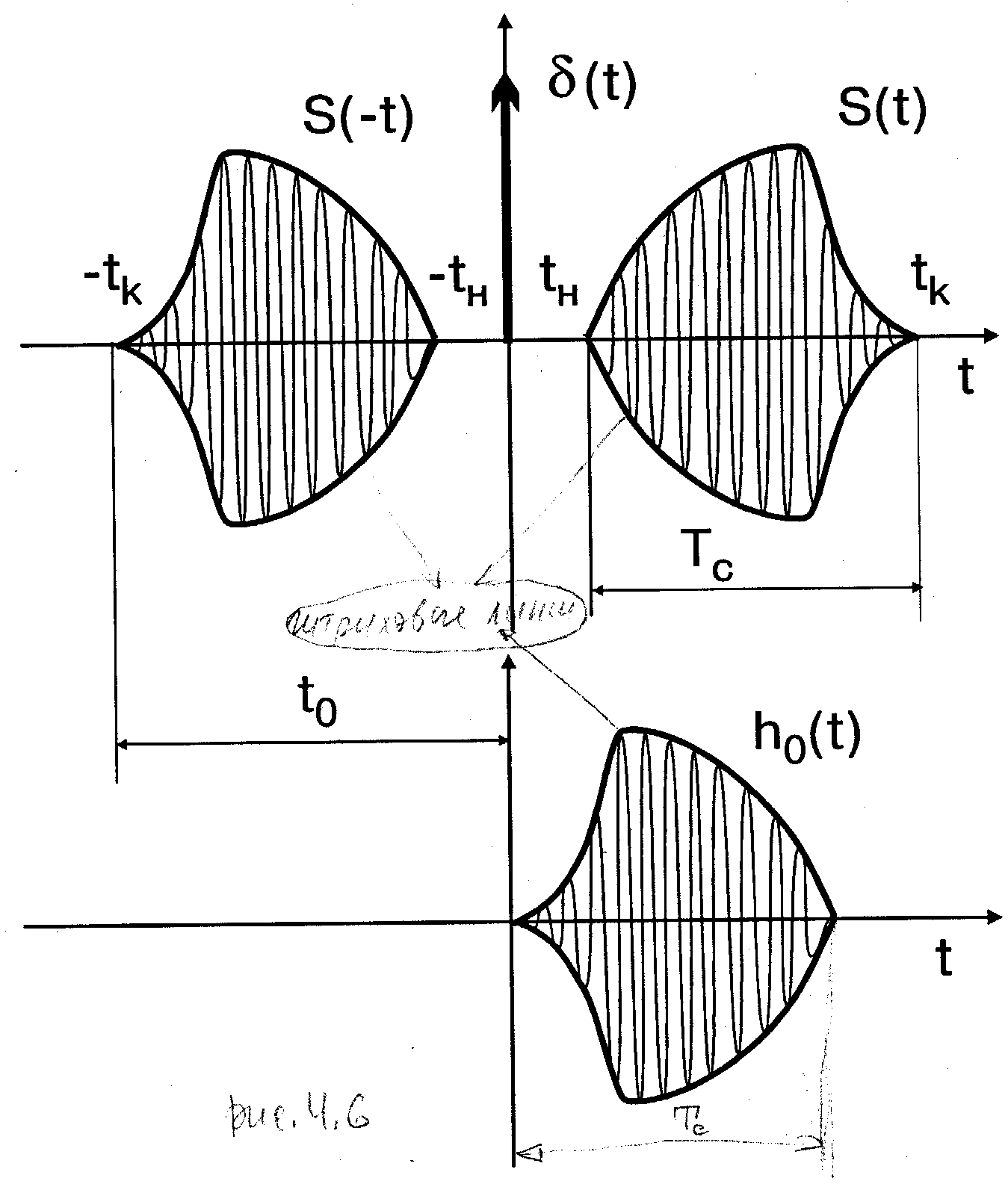
Рис. 4.6
На рисунке отмечены моменты t н и t к начала и окончания сигнала. Длительность сигнала не превосходит интервал наблюдения T с = t к - t н £ T. На рис.4.6 изображена также функция s (- t), являющаяся зеркальным отображением сигнала s (t). Функция s (- t) с математической точки зрения можно было бы принять в качестве импульсной характеристики ОФ h 0(t). В этом случае t 0=0 и υ (0)= Y. Однако импульсная характеристика h 0(t)= s (- t) (рис.4.6) физически нереализуема. Импульсная характеристика-реакция на воздействие в виде d -функции, поданной в момент  , не может появиться раньше воздействия. Поэтому условие h (t)=0 при
, не может появиться раньше воздействия. Поэтому условие h (t)=0 при  является условием физической реализуемости фильтра. Исходя из этого условия характеристику s (- t) следует сместить на некоторую величину t 0, так чтобы импульсная характеристика s (- t + t 0) целиком располагалась на положительной полуоси t Î(0,¥) (рис.4.6). Из рисунка следует, что t 0 должно быть: t 0³ t к. В дальнейшем принимается минимальное значение
является условием физической реализуемости фильтра. Исходя из этого условия характеристику s (- t) следует сместить на некоторую величину t 0, так чтобы импульсная характеристика s (- t + t 0) целиком располагалась на положительной полуоси t Î(0,¥) (рис.4.6). Из рисунка следует, что t 0 должно быть: t 0³ t к. В дальнейшем принимается минимальное значение
 . (4.4.5)
. (4.4.5)
Это значит, что импульсная характеристика начинается в  , а корреляционный интеграл формируется на выходе ОФ в момент окончания сигнала s (t): υ (t к)= Y. В частном случае, когда сигнал, длительности T с, начинается в момент t =0(t н =0), t к = T с и υ (T с)= Y. Приведем пример определения импульсной характеристики ОФ.
, а корреляционный интеграл формируется на выходе ОФ в момент окончания сигнала s (t): υ (t к)= Y. В частном случае, когда сигнал, длительности T с, начинается в момент t =0(t н =0), t к = T с и υ (T с)= Y. Приведем пример определения импульсной характеристики ОФ.
Пример 4.4.1. В качестве сигнала выберем широко используемый в радиолокации линейно модулированный по частоте (ЛЧМ) радиоимпульс
 (4.4.6)
(4.4.6)
и определим импульсную характеристику h 0(t)= s (t 0- t) согласованную с этим сигналом. На рис.4.7 показано изменение во времени огибающей A (t) и мгновенной частоты f (t) ЛЧМ радиоимпульса (6)
 , (4.4.7)
, (4.4.7)
где y (t)=2 p (f 0 t + Ft 2 /T c) - полная фаза колебаний радиоимпульса. На рис.4.8 изображены ЛЧМ радиоимпульс s (t), его зеркальное отображение s (- t) и импульсная характеристика ОФ (t 0= t к =0,5 T с)
h 0(t)= s (0,5 Tс - t). (4.4.8)
Таким образом, импульсная характеристика ОФ представляет собой зеркальное отображение сигнала s (- t), сдвинутое на положительную полуось времени t Î(0,¥).
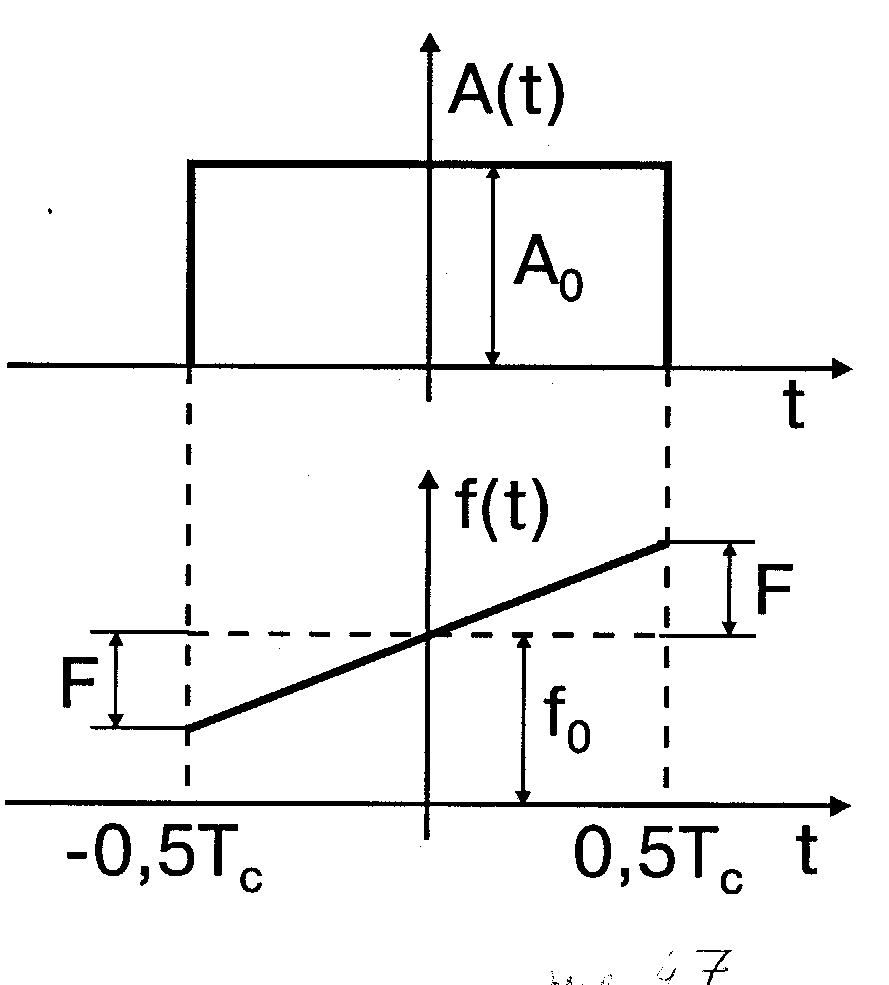
Рис. 4.7
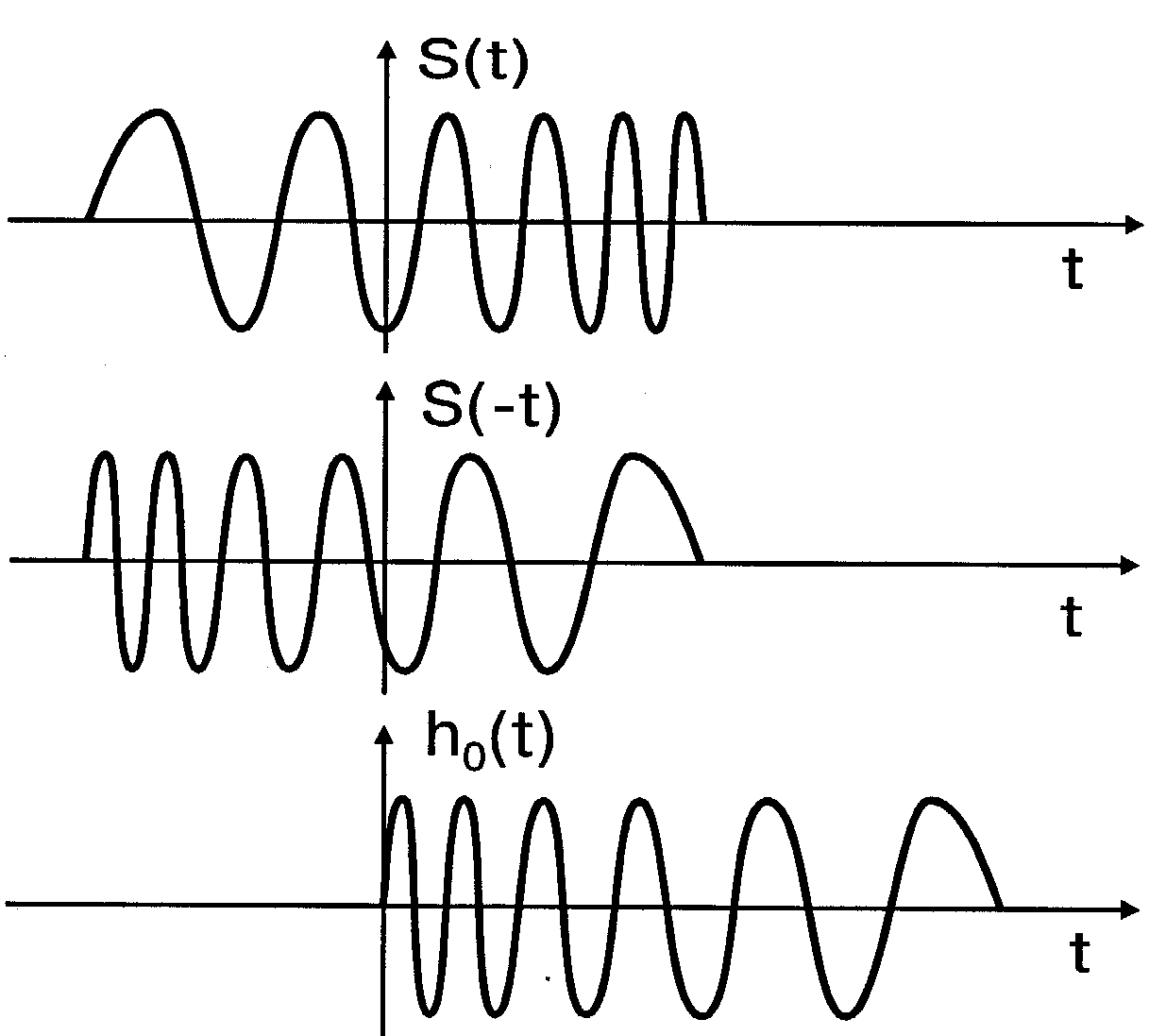
Рис. 4.8
Заметим, что для сигналов s (t), симметричных относительно некоторой оси  , зеркальный сигнал s (- t) совпадает по форме с исходным s (t). При этом
, зеркальный сигнал s (- t) совпадает по форме с исходным s (t). При этом  , где
, где  опять выбирается из условия h 0(t)=0при
опять выбирается из условия h 0(t)=0при  . В частности, при
. В частности, при  можно принять
можно принять  и
и  .
.
4.4.3. Прохождение сигнала и помехи через ОФ. Выход ОФ
 . (4.4.9)
. (4.4.9)
Так как согласно (4)
 , (4.4.10)
, (4.4.10)
то (9) принимает вид
 . (4.4.11)
. (4.4.11)
Принимаемое колебание является суммой сигнала и помехи u = s + n. Поэтому и выход (11) представляет собой сумму сигнальной  и помеховой
и помеховой  составляющих
составляющих
 . (4.4.12)
. (4.4.12)
Рассмотрим эти составляющие
 , (4.4.13)
, (4.4.13)
где  - (временная) корреляционная функция ожидаемого сигнала s (t)
- (временная) корреляционная функция ожидаемого сигнала s (t)
 , (4.4.14)
, (4.4.14)
являющаяся четной функцией с максимумом, равным энергии сигнала Э, в нуле
 ,
,  =Э=max. (4.4.15)
=Э=max. (4.4.15)
Следовательно, сигнальная составляющая выхода ОФ воспроизводит корреляционную функцию сигнала  и имеет максимум, равный Э, в момент
и имеет максимум, равный Э, в момент  формирования корреляционного интеграла Y.
формирования корреляционного интеграла Y.








