

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...
Топ:
Оценка эффективности инструментов коммуникационной политики: Внешние коммуникации - обмен информацией между организацией и её внешней средой...
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного...
Устройство и оснащение процедурного кабинета: Решающая роль в обеспечении правильного лечения пациентов отводится процедурной медсестре...
Интересное:
Распространение рака на другие отдаленные от желудка органы: Характерных симптомов рака желудка не существует. Выраженные симптомы появляются, когда опухоль...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Как мы говорим и как мы слушаем: общение можно сравнить с огромным зонтиком, под которым скрыто все...
Дисциплины:
|
из
5.00
|
Заказать работу |
Содержание книги
Поиск на нашем сайте
|
|
|
|
Метод перемещений в определенном смысле противоположен методу сил. При использовании метода сил отбрасываются лишние связи и из кинематических условий находятся действующие в них усилия. В методе перемещений вводятся дополнительные «управляемые» связи в узлах конструкции и из условий равенства нулю реакций в этих фиктивных связях вычисляются фактические значения перемещений. По найденным значениям перемещений узлов можно определить внутренние усилия в любомэлементе конструкции. Метод перемещений удобен для компьютерной реализации, так как в нем, в отличие от метода сил, основная система задается единственным образом.
Рассмотрим алгоритм расчета этим методом.
1. Производится анализ заданной системы в целях определения степени ее кинематической неопределимости, т. е. количества неизвестных линейных и угловых перемещений.
Для определения линейных перемещений в заданной системе все жесткие связи между стержнями и между стержнями и основанием заменяют шарнирами, после чего находят количество опорных стержней, которые надо установить, чтобы система стала геометрически неизменяемой (рис. 4.8, а—в). Добавленные опорные стержни (обозначены двойной линией) показывают расположение и количество неизвестных линейных перемещений.
Количество угловых неизвестных перемещений равно количеству жестких узлов заданной системы, в которых соединяются два или более стержней. Степень кинематической неопределимости vравна суммарному количеству линейных и угловых неизвестных перемещений. Система на рис. 4.8 три раза кинематически неопределима  . Следует отметить, что степень кинематической неопределимости никак не связана со степенью статической неопределимости. Так, та же система один раз статически неопределима.
. Следует отметить, что степень кинематической неопределимости никак не связана со степенью статической неопределимости. Так, та же система один раз статически неопределима.
2.
 штук). Во все жесткие узлы (жесткое соединение двух и более стержней) вводят заделки, препятствующие угловым перемещениям, а в тех местах, где обнаружены неизвестные линейные перемещения, размещают опорные стержни (рис. 4.8, г). Особенность фиктивных заделок такова, что каждая из них блокирует только одно перемещение — поворот узла — и не препятствует линейным перемещениям. Кроме того, каждой из фиктивных связей при необходимости можно задать произвольное перемещение по ее направлению, т. е. повернуть заделку на какой-то угол или сместить опорный стержень в его же направлении.
штук). Во все жесткие узлы (жесткое соединение двух и более стержней) вводят заделки, препятствующие угловым перемещениям, а в тех местах, где обнаружены неизвестные линейные перемещения, размещают опорные стержни (рис. 4.8, г). Особенность фиктивных заделок такова, что каждая из них блокирует только одно перемещение — поворот узла — и не препятствует линейным перемещениям. Кроме того, каждой из фиктивных связей при необходимости можно задать произвольное перемещение по ее направлению, т. е. повернуть заделку на какой-то угол или сместить опорный стержень в его же направлении.
3. Далее необходимо сформулировать условия, при выполнении которых основная система будет полностью идентична заданной. Это произойдет в том случае, если все фиктивные связи получат перемещения, равные перемещениям этих узлов в заданной системе под действием реальных нагрузок. При этом реакции в этих связях будут равны нулю:  так как они не отклоняют систему от ее равновесного состояния. Полагая, что рассчитываемые системы являются линейными (п. 2.1.1), и применяя принцип суперпозиций, реакции, возникающие в каждой фиктивной связи, можем представить как сумму реакций от перемещения всех фиктивных связей и от внешней нагрузки, т. е.:
так как они не отклоняют систему от ее равновесного состояния. Полагая, что рассчитываемые системы являются линейными (п. 2.1.1), и применяя принцип суперпозиций, реакции, возникающие в каждой фиктивной связи, можем представить как сумму реакций от перемещения всех фиктивных связей и от внешней нагрузки, т. е.:
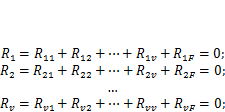
Здесь обозначено:  — реакция, возникающая в k -й связи при перемещении j -й связи в ее «естественное» положение, т. е. соответствующее перемещению в заданной системе (k= 1, 2,... и, у = 1, 2,..., и).Поскольку рассматриваемые системы линейны, эта реакция пропорциональна перемещению j -й связи, т. е.
— реакция, возникающая в k -й связи при перемещении j -й связи в ее «естественное» положение, т. е. соответствующее перемещению в заданной системе (k= 1, 2,... и, у = 1, 2,..., и).Поскольку рассматриваемые системы линейны, эта реакция пропорциональна перемещению j -й связи, т. е.  ,где
,где  — фактическое (искомое) перемещение у-й связи в заданной системе;
— фактическое (искомое) перемещение у-й связи в заданной системе;  — коэффициент жесткости, численно равный усилию, которое возникает в k -й связи приеденичном перемещении j- й связи, он имеет размерность
— коэффициент жесткости, численно равный усилию, которое возникает в k -й связи приеденичном перемещении j- й связи, он имеет размерность 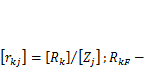 свободный член уравнения, равный реакции, возникающей в k -й связи от внешней нагрузки.С учетом введенных обозначений можем записать систему канонических уравнений метода перемещений в следующем виде:
свободный член уравнения, равный реакции, возникающей в k -й связи от внешней нагрузки.С учетом введенных обозначений можем записать систему канонических уравнений метода перемещений в следующем виде:
| (4.14) |

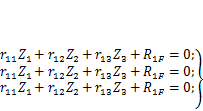
Количество уравнений равно степени кинематической неопределимости системы. Для схемы на рис. 4.8 следует записать три уравнения:
| (4.15) |
Далее необходимо определить коэффициенты этих уравнений и свободные члены  .
.
4. Значения коэффициентов канонических уравнений вычисляют статическим методом. Для этого, используя готовые решения (табл. 4.1), строят эпюры изгибающих моментов для vсостояний, в каждом из которых задается единичное смещение одной из фиктивных связей (рис. 4.8, д—ж) и от внешней нагрузки (рис. 4.8, з). После чего требуемые значения коэффициентов и свободных членов получаются как реакции в соответствующих связях.
Рассмотрим методику определения коэффициентов канонических уравнений статическим методом на примере системы, представленной на рис. 4.8.
В состоянии 1 фиктивная связь 1 смещается по своему направлению на  . Горизонтальный ригель смещается без изгиба. Изгиб вертикального стержня приводит к возникновению горизонтальной реакции в связи 1 (табл. 4.1, п. 5):
. Горизонтальный ригель смещается без изгиба. Изгиб вертикального стержня приводит к возникновению горизонтальной реакции в связи 1 (табл. 4.1, п. 5):
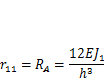
и моментной реакции в связи 2, которая находится из условия равновесия узла (рис. 4.8, и, табл. 4.1, п. 5),
Реакция  , возникающая при повороте заделки, равна сумме изгибающих моментов (М2) в сечениях стержней, примыкающих к узлу (рис. 4.8, е, к, М’2, М2, М2). Значения этих моментов находятся по табл. 4.1 (п. 1 и 4), направление действия момента, приложенного к узлу,
, возникающая при повороте заделки, равна сумме изгибающих моментов (М2) в сечениях стержней, примыкающих к узлу (рис. 4.8, е, к, М’2, М2, М2). Значения этих моментов находятся по табл. 4.1 (п. 1 и 4), направление действия момента, приложенного к узлу,
определяется по расположению растянутого волокна, которое указывает эпюра. В результате получится

Остальные коэффициенты вычисляются по формулам табл. 4.1:

Свободные члены канонических уравнений равны значениям реакций в связях 1, 2 и 3 от внешней нагрузки F. Как видно из схем на рис. 4.8, з,
5. После подстановки всех коэффициентов в систему (4.14) вычисляются значения перемещений всех фиктивных связей  .
.
6. Результирующая эпюра изгибающих моментов строится как сумма эпюр (рис. 4.8, л)
Проконтролировать правильность решения можно путем проверки условий равновесия узлов в результирующей эпюре моментов.
Расчет пластин и оболочек
|
|
|

Опора деревянной одностоечной и способы укрепление угловых опор: Опоры ВЛ - конструкции, предназначенные для поддерживания проводов на необходимой высоте над землей, водой...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...

История развития хранилищ для нефти: Первые склады нефти появились в XVII веке. Они представляли собой землянные ямы-амбара глубиной 4…5 м...

Историки об Елизавете Петровне: Елизавета попала между двумя встречными культурными течениями, воспитывалась среди новых европейских веяний и преданий...
© cyberpediasu.com 2017-2026 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!

